I Produit scalaire et norme
I.1 Produit scalaire
I.1.1 Définition-proposition
Le produit scalaire canonique de deux vecteurs- Bilinéaire
:
- Symétrique
:
- Positive
:
- Définie
:
Preuve
La bilinéarité est évidente par la formule de produit matriciel.
De plus,
Remarquer que
De plus,
Remarquer que
I.1.2 Exemple
Les vecteurs
I.2 Norme et distance
I.2.1 Définition
- On appelle norme (euclidienne) d'un vecteur
- On appelle distance (euclidienne) entre deux vecteurs
I.2.2 Proposition
Soient
Preuve
- Par définition on a
et il suffit de regrouper. - Changer
- Simple transformation de formules.
I.2.3 Théorème (Inégalité de Cauchy-Schwarz)
SoientPreuve
Soient
- Si
- Si
I.2.4 Exemple
I.2.5 Corollaire (Minkowski)
Soient
Preuve
On a immédiatement, d'après Cauchy-Schwarz
Pour le deuxième point, on applique l'inégalité triangulaire à
Pour le deuxième point, on applique l'inégalité triangulaire à
I.2.6 Remarque
Faire un dessin : inégalité triangulaire.I.2.7 Proposition (Propriétés de la norme)
SoitII Orthogonalité
II.1 Familles orthogonales
II.1.1 Définition
Soit- On dit que
Explication
La notion d'orthogonalité repose maintenant sur le produit scalaire, contrairement à nos habitudes de 1ère année. On a pas du tout de notion d'angle.II.1.2 Exemple
Montrer que la base canonique deII.1.3 Passer à une famille orthonormale
SoitII.1.4 Proposition
Soit
Preuve
Supposons que
II.1.5 Théorème (Pythagore)
Soit
Preuve
On calcule cette fois
Il s'agit simplement de développer les deux sommes et identifier les termes nuls (tous, sauf lorsque les deux vecteurs concernés sont égaux).
Il s'agit simplement de développer les deux sommes et identifier les termes nuls (tous, sauf lorsque les deux vecteurs concernés sont égaux).
II.2 Bases orthonormées
II.2.1 Théorème
Soit- On note
- Si on note
Preuve
- On a
- On a par le même calcul
II.2.2 Exemple
Montrer que la familleII.2.3 Corollaire
SoitAlors
Preuve
On a en effet, pour un
II.2.4 Mnémotechnie
Pour calculer la matrice deII.3 Orthogonal d'un sev
II.3.1 Définition
Soient- On dit que
II.3.2 Exemple
Trouver un exemple dansII.3.3 Remarque
SiII.3.4 Proposition
Soient- Soit
Preuve
- Si
Ceci prouve facilement la seule implication non triviale.
II.3.5 Définition
SoitII.3.6 Remarque
Si on aII.3.7 Exemple
- Calculer l'orthogonal de la droite d'équation
II.3.8 Attention
On considèreII.3.9 Proposition
Soit
Preuve
Le seul vecteur orthogonal à lui même est
Montrons que
Par linéarité de chaque coordonnées,
Considérons
D'après le théorème du rang,
Ainsi
Finalement, si
Montrons que
Par linéarité de chaque coordonnées,
Considérons
D'après le théorème du rang,
Ainsi
Finalement, si
II.3.10 Exemple
- Calculer le supplémentaire orthogonal de
- Dans
II.3.11 Exemple
Projection et symétrie dans le cas oùIII Matrices particulières
III.1 Matrices orthogonales
III.1.1 Définition
SoitIII.1.2 Produit matriciel et produit scalaire
SoientAlors, pour
Notons de plus
III.1.3 Théorème
Soit- Les colonnes de
- Les lignes de
- Pour toutes colonnes
- Pour toute colonne
Preuve
- On a clairement
- D'après le point précédent,
- Grâce à
- Soient
Ainsi, si
Réciproquement, supposons que
Or pour une matrice
On a bien
III.1.4 Exemple
- Quelle est la méthode la plus efficace pour vérifier qu'une matrices est orthogonale ?
III.1.5 Proposition
SoitPreuve
Simple traduction du théorème précédent.
III.1.6 Changement de bases orthonormales
SoitPour
III.1.7 Proposition
L'inverse d'une matrice orthogonale est orthogonale et le produit de deux matrices orthogonales est orthogonal.
Preuve
Si
III.1.8 Interprétation géométrique
SiIII.1.9 Théorème
Soit
Preuve
On a
III.1.10 Définition
III.1.11 Exercice
Montrer queIII.1.12 Définition
Soit
III.1.13 Proposition
Effectuer un changement de base entre deux bases orthonormées directes ne modifie pas les déterminants (des familles ni des applications linéaires).
On retrouve ici la notion de produit mixte vu en géométrie de 1ère année. On peut calculer le déterminant d'une famille dans n'importe quelle base orthonormée directe et obtenir toujours la même valeur.
Preuve
SI
III.2 Matrices symétriques réelles
Rappel : Pour
III.2.1 Définition
Une matrice
III.2.2 Exercice
SoitIII.2.3 Proposition
SoitPreuve
- Si
- Réciproquement, supposons que pour tous
Montrons que
On a, pour tout
III.2.4 Théorème
Soit
- Les valeurs propres de
- Si
Autrement dit, les sous espaces propres de
Preuve
- Hors programme. Soit
Soit
Alors
On a alors
De plus,
Comme - Calculons
III.3 Théorème spectral
III.3.1 Théorème
Soit
- Les sous-espace propres de
Preuve
Hors programme.
Le polynôme
On applique le procédé de Gram-Schmidt à la base
On obtient
Hors programme.
Le polynôme
On applique le procédé de Gram-Schmidt à la base
On obtient
III.3.2 Remarque
SiIII.3.3 Exemple
Montrer que- Remarquons que
- De plus, la somme (avec multiplicité) des racines de
- Après calcul,
- Les espaces propres de
III.4 Trouver une base orthonormée
III.4.1 Produit vectoriel
Diagonaliser dans une BON la matricela méthode du malin :
- L'espace propre associé à 1 est le plan
- Comme les espaces propres de
Posons
Ainsi
III.4.2 Théorème (Orthogonalisation de Gram-Schmidt)
Soit
Preuve
Dessin
On note
On note
- Soit
- Par récurrence, une base orthogonale de
III.4.3 Exemple
On considèreOn trouve que 0 est valeur propre associée à un espace de dimension 3,
Comme
Trouvons une base orthogonale de
On pose déjà
Ainsi
On cherche maintenant
IV Coniques
Changement de repère, rappel
On se place dansNotons
Alors
IV.1 Forme réduite
IV.1.1 Définition
Une conique de
IV.1.2 Exemple
Les cercles sont des cas particuliers de coniques.IV.1.3 Définition
Soient
IV.2 Tracés des formes réduites
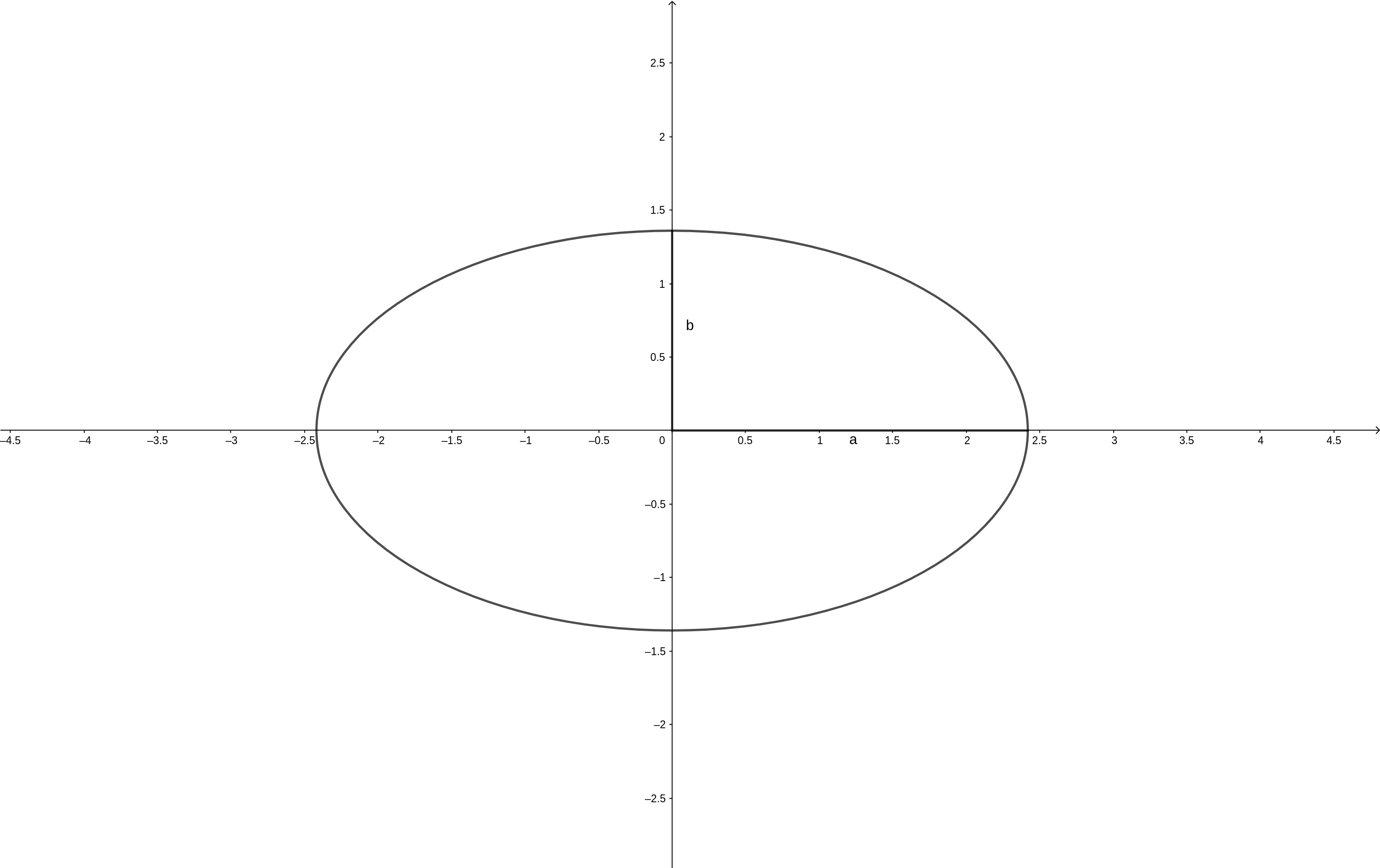
IV.2.1 Ellipse
On souhaite tracer dans le repère canonique l'ellipse d'équation réduiteRemarquons que pour un point
On étudie donc la courbe paramétrée
Finalement on étudie
| 0 | |||
| 0 |
Il n'y a pas de limites infinies dans la tableau de variations, donc aucune étude de branche infinie n'est nécessaire.
On trace d'abord un premier quart d'ellipse, et le reste du tracé est assez évident par les deux symétries exhibées qui ne modifient pas les directions des tangentes, mais seulement les points où on les trace.
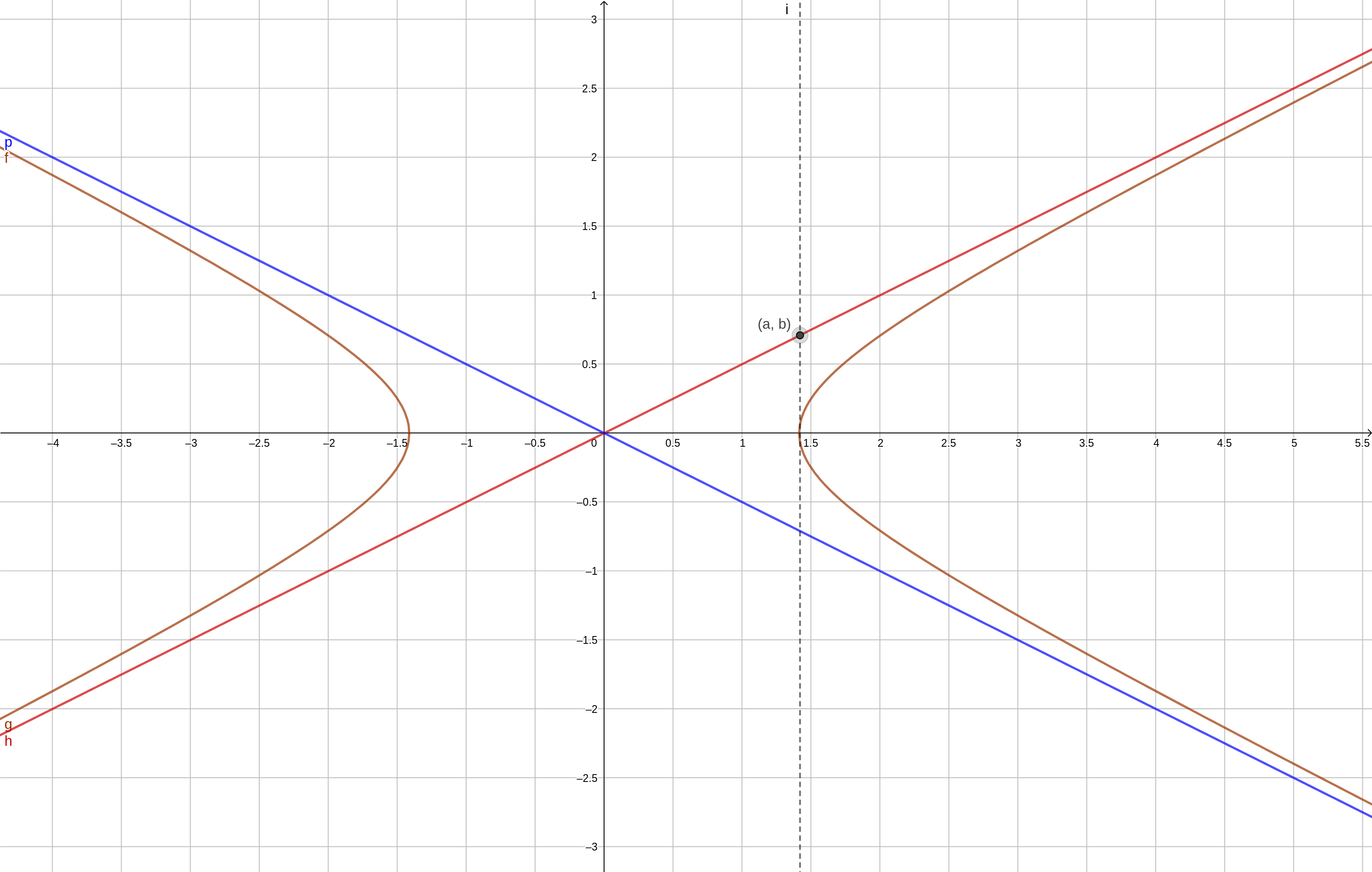
IV.2.2 Hyperbole
On s'intéresse cette fois àPar contre, remarquons que
Ainsi, on va paramétrer la moitié de
Posons
Dans la ligne du point précédent, on note
| 0 | |||
On observe une tangente verticale en
- on a
- De plus,
- Pour
Remarque : comme
Traçons maintenant. On remarque que l'asymptote trouvée passe par l'origine et le point de coordonnées
IV.2.3 Exercice
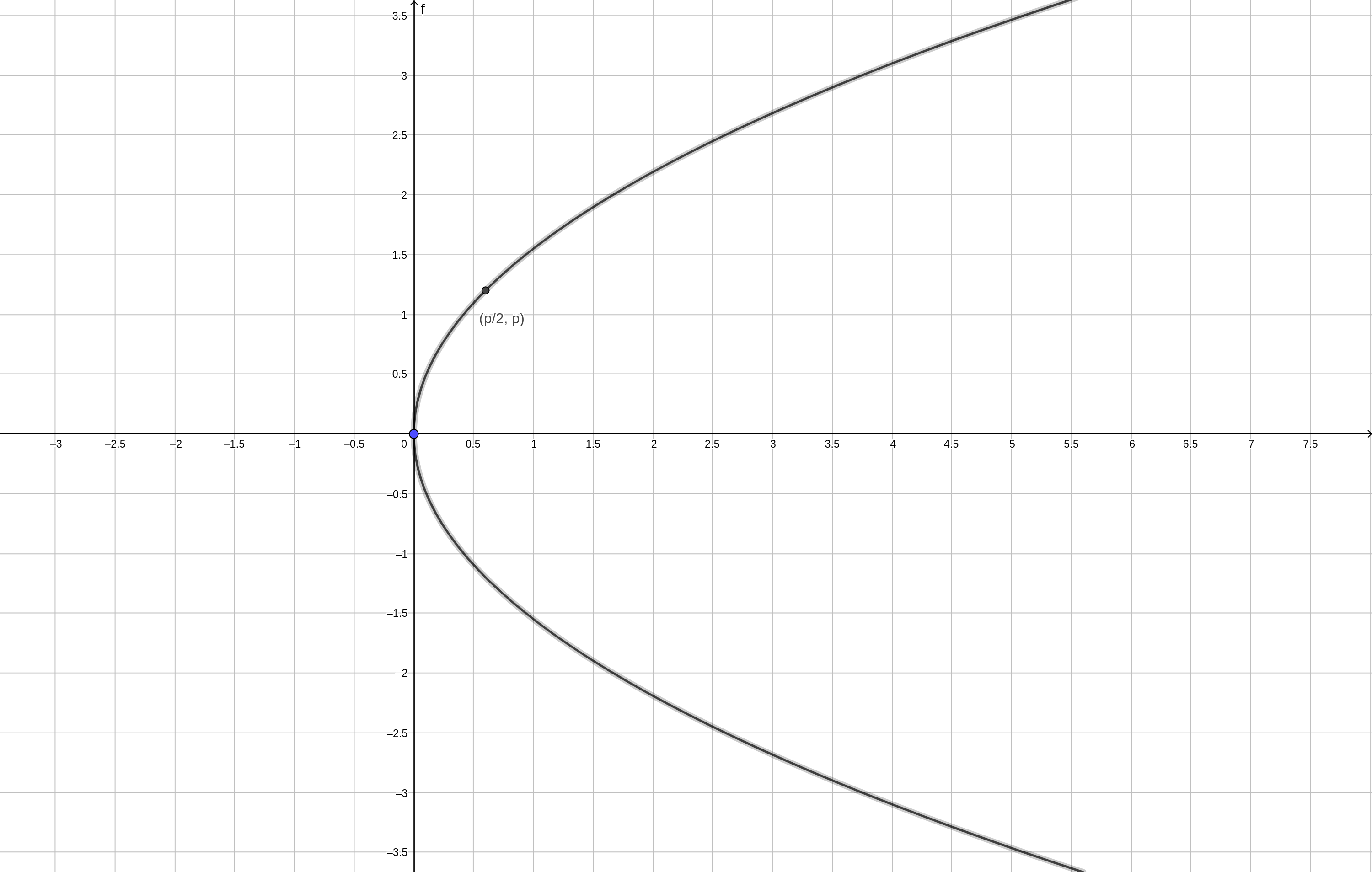
Montrer que l'hyperbole d'équationIV.2.4 Parabole
On trace ici la parabole d'équation réduiteOn peut paramétrer par
Une deuxième méthode, plus rapide, consiste à effectuer le changement de repère donné par la matrice de passage
Remarquons pour le tracé, que dans le repère canonique, notre parabole passe par l'origine (tangente verticale) et les deux points
IV.3 Réduction d'une conique
IV.3.1 Ecriture matricielle
Fixons les coefficients d'une équation de conique.On pose
D'après le théorème spectral, on peut toujours trouver une base orthonormée directe dans laquelle l'équation n'a plus de terme en
IV.3.2 Après rotation
CommePosons
- Si
- Si
Suivant la valeur de la constante, on peut obtenir un seul point, l'ensemble vide ou deux droites sécantes.
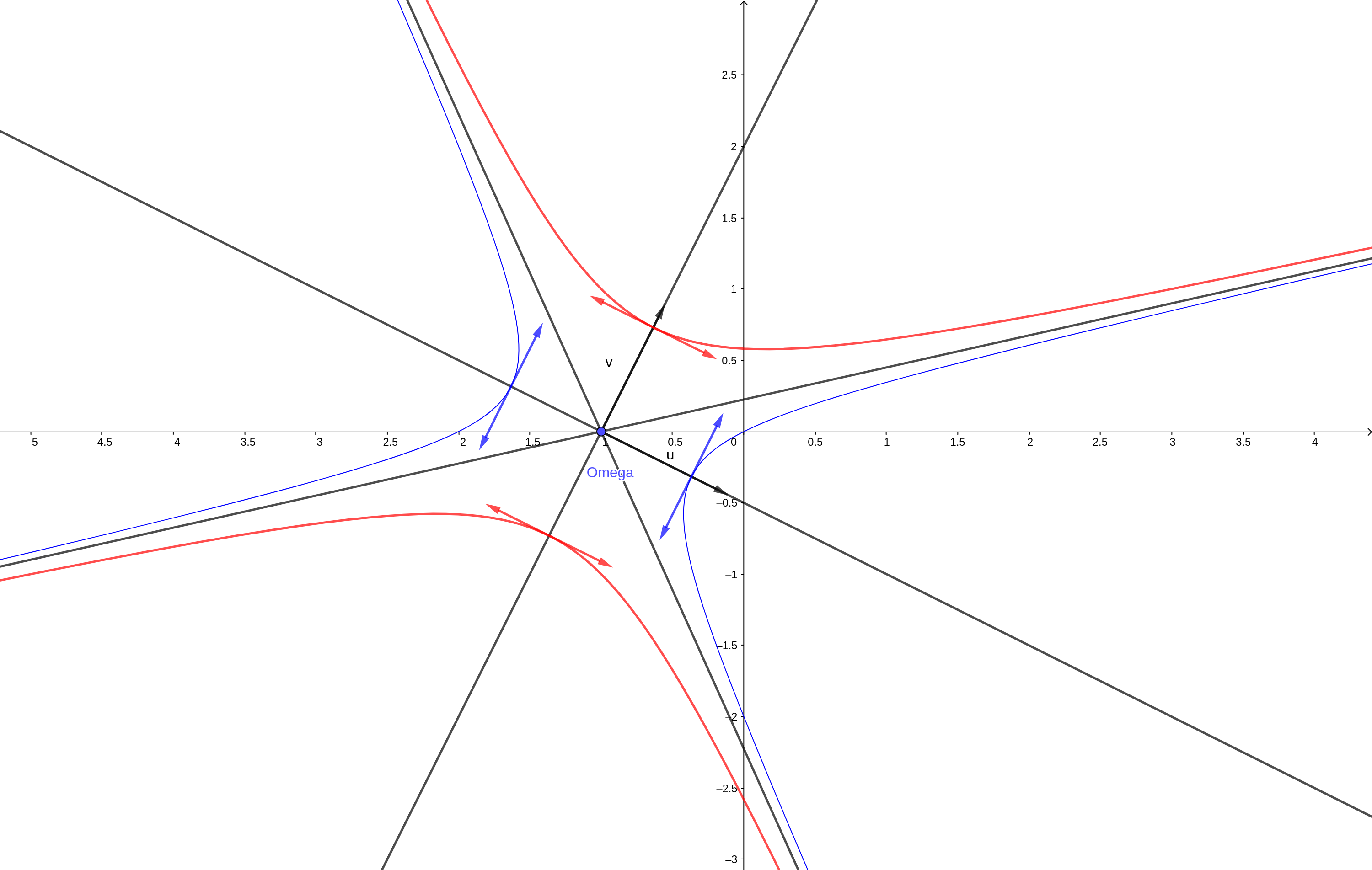
IV.3.3 Exemple
Tracer les coniquesOn pose
De plus,
Après calcul,
En notant
On a alors
Dans le repère
- L'équation
- L'ensemble des solutions de
On commence par tracer le nouveau repère, dont on a donné des vecteurs directeurs des axes, puis on trace l'ellipse dans ce nouveau repère. Avec les notations des équations réduites de ce cours, on a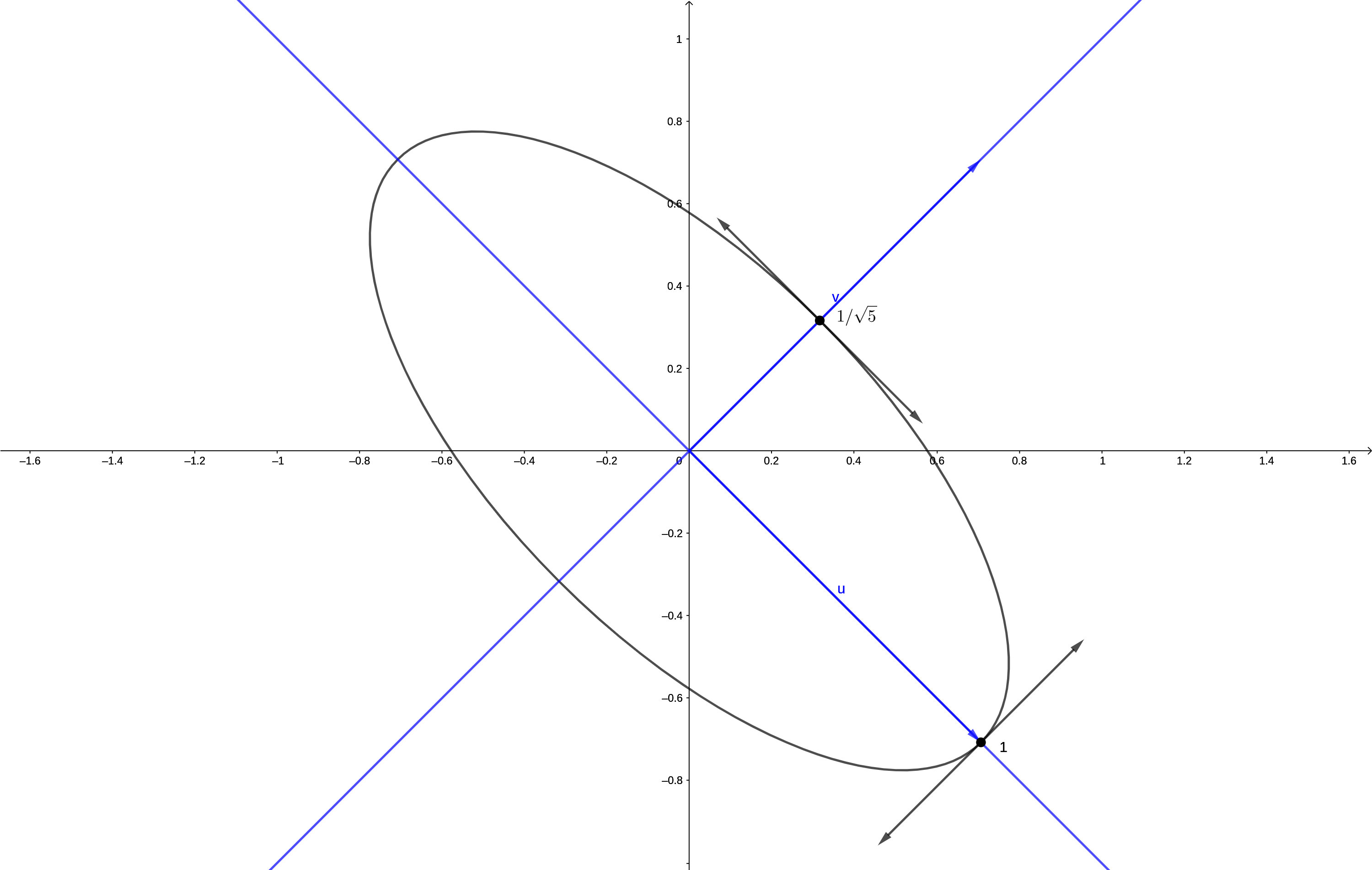
Ellipse d'équation
IV.3.4 Exemple
TracerPosons la matrice est
On pose
- Cas
- Cas
- Cas
L'équation n'est pas réduite, mais il suffit d'échanger le rôle des axes pour tracer.
On obtient une hyperbole ou la réunion de deux droites suivant la valeur de
IV.3.5 Méthode
Pour réduire une équation de conique :- Diagonaliser
- Passer sous forme canonique en
- Exhiber l'éventuel centre, faire le tracé dans le nouveau repère.