Dans ce chapitre
I Opérations
I.1 Produit, puissances
I.1.1 Proposition (Opérations sur les matrices)
- Les règles de calculs sur les sommes de matrices sont les mêmes que pour les nombres, en prenant garde à sommer des matrices de même taille.
- Si
On peut tout à fait retrouver cette formule en posant le produit matriciel. - Avec les mêmes notations, et en posant
- Même pour des matrices carrées pour lesquelles
- Si on peut calculer ce produit matriciel, alors
I.1.2 Notation
PourI.1.3 Exemple
FactoriserI.1.4 Exemple
On suppose qu'une matrice carréeI.1.5 Proposition (Théorème du binôme, version matrices)
Soit
I.1.6 Exemple
Calculer toutes les puissances deNotons
Alors
I.1.7 Proposition
Soit
I.1.8 Exercice
On suppose queexo : donner un exemple d'une telle matrice.
I.1.9 Rappels sur les matrices particulières
Un produit ou une somme de matrices triangulaire (ou diagonale) reste triangulaire.Si
I.1.10 Définition
SoitAinsi la première ligne (resp. colonne) de
On a immédiatement
I.1.11 Produit et transposition
SoientI.1.12 Lignes et colonnes
SoitI.1.13 Produit par une colonne
SoitI.2 Inversibilité
I.2.1 Définition
Une matrice
On note
I.2.2 Proposition
On dit que
- Le produit de deux matrices
- Si
I.2.4 Inverse particulière
Une matrice triangulaireEn particulier, la relation I.1.9 est valable pour tout
I.2.5 Définition
Soit- Le noyau de
- L'image de
L'interprétation en terme de système est :
I.2.6 Théorème (Théorème du rang)
SoitPreuve
Il y a deux manières de voir ce résultat
- Sur les systèmes.
Après mise sous forme échelonnée réduite, on distingue deux types d'inconnues : les inconnues principales et les paramètres. On a alors - Sur les applications linéaires. Notons
Alors
I.2.7 Théorème
Soit
On a les équivalences suivantes
I.2.8 Cas
On a en plus
I.3 Matrices et bases
I.3.1 Définition
Soit
I.3.2 Exemple
Rappel :I.3.3 Proposition
Le rang d'une famille est le même que le rang de sa matrice dans une base. En particulier, ce rang ne dépend pas de la base choisie.
I.3.4 Définition
- Soient
- Si
I.3.5 Exemple
On considère l'application linéaireI.3.6 Produit matriciel et évaluation
Avec les notations de la définition. Soient en plusI.3.7 Exemple
Avec l'exemple précédent, sur les polynômes, poserI.3.8 Théorème
SoientI.3.9 Exemple
Toujours avec le même exemple, calculer la matrice dansI.3.10 Théorème
Soit
Dans ce cas
I.3.11 Définition
SoitI.3.12 Théorème
SoientSoit
I.3.13 Exemple
Donner la matrice dans la base canonique deI.3.14 Définition
Soient
I.3.15 Remarque
- Deux matrices semblables ont le même rang.
- La seule matrice semblable à
II Trace
II.1 Trace d'une matrice
II.1.1 Définition
Soit
II.1.2 Exemple
PourII.1.3 Proposition
Soient
II.1.4 Exercice
Montrer que le noyau de la trace est un hyperplan et en donner une base.II.1.5 Effet du produit
Montrer que dans le cas général on a pasII.2 Trace d'un endomorphisme
II.2.1 Théorème (Trace d'un produit)
Soient
Preuve
Notons
Pour
De la même manière,
Pour
De la même manière,
II.2.2 Exercice
Montrer queEn déduire la valeur de cette trace dans le cas où
II.2.3 Matrices semblables
SiEn effet, si on a
II.2.4 Invariants
On peut maintenant dire que deux matrices semblables ont :- le même rang
- la même trace
II.2.5 Définition-proposition
Soit
II.2.6 Exemple
Soit
II.2.7 Exercice
SoitII.2.8 Linéarité
PourIII Déterminant
III.1 Déterminant de taille
III.1.1 Définition-proposition
Il existe une unique application
III.1.2 Conséquences de la définition
Notons- Si on a
- Si on a
III.1.3 Exemple
Calculer
III.1.4 Interprétation géométrique
En dimension 2 : il s'agit de l'aire (algébrique, ie on obtient un nombre négatif dans le cas d'un sens indirect) d'un parallélogramme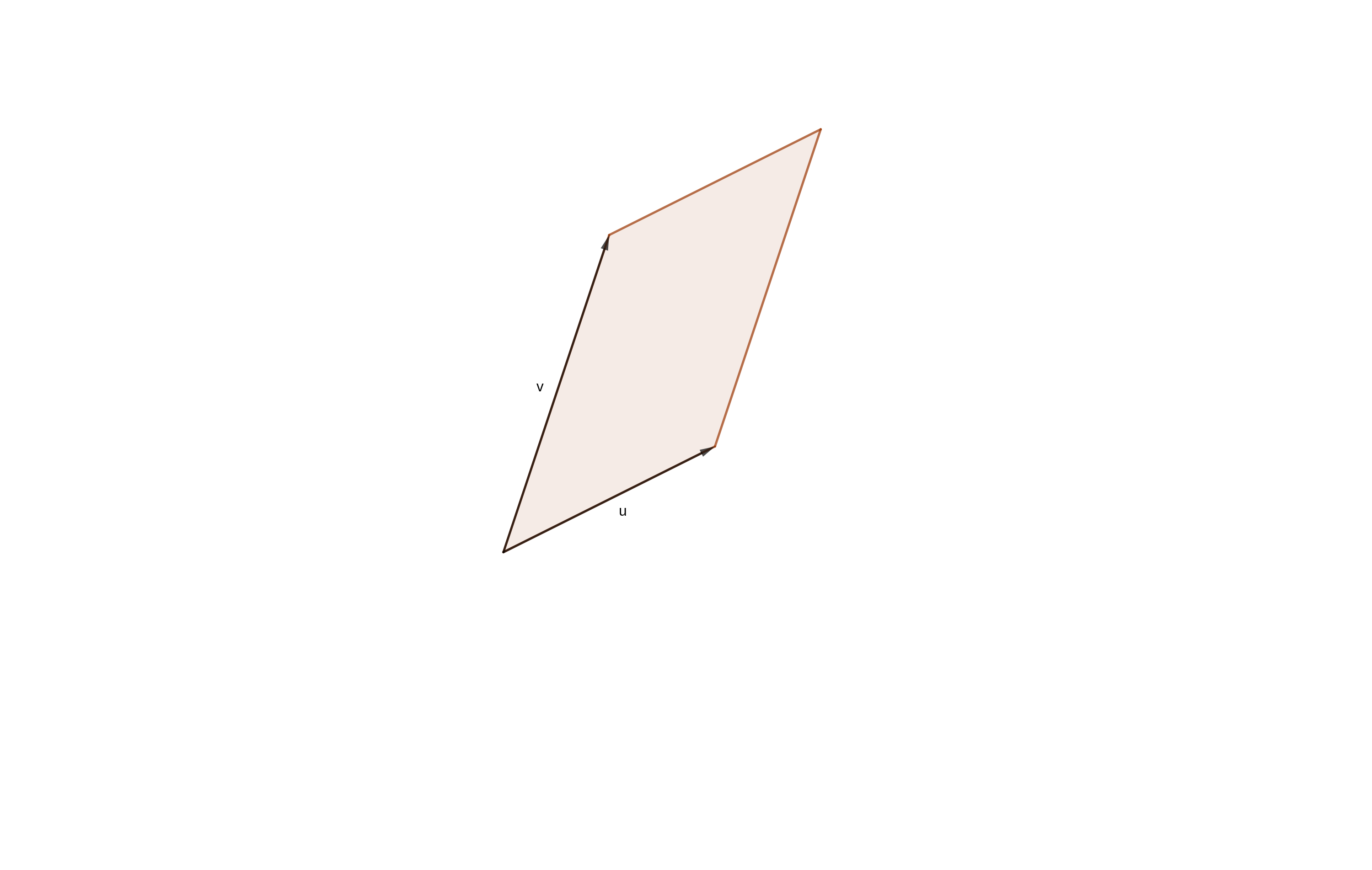
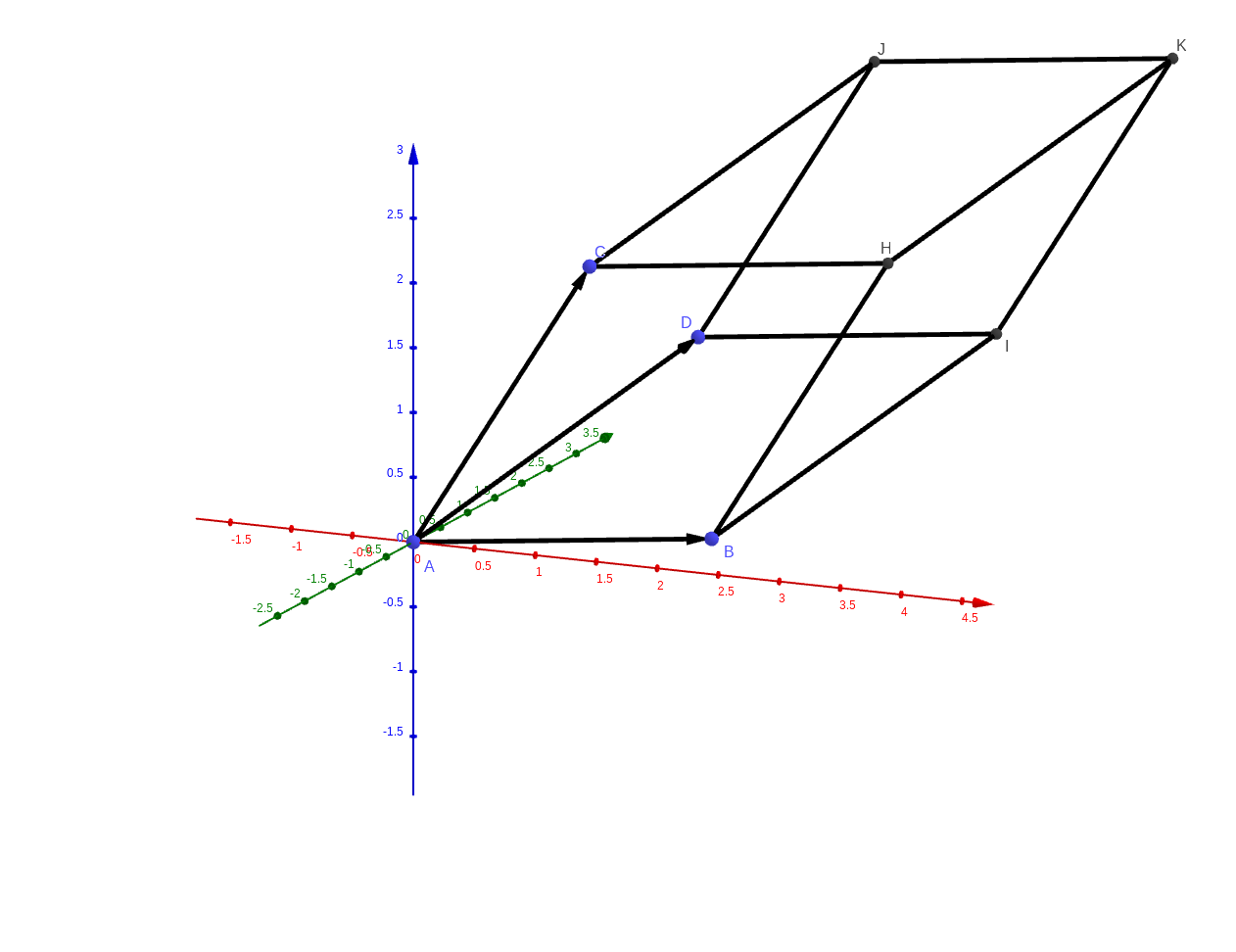
En dimension 3 :il s'agit du volume (algébrique) d'un parallélépipède. Dans la figure suivante, on construit un parallélépipède sur les 3 vecteurs
III.1.5 Notation
Comme en dimension 2 et 3, on note un déterminant sous forme d'un tableau de nombre entouré de barres verticales.III.1.6 Proposition (Opérations sur les déterminants)
Soit- Si l'opération est
- Si l'opération est
- Si l'opération est
III.1.7 Corollaire
SoitIII.1.8 Calcul en pratique
SoitIII.1.9 Exemple
Calculer
III.1.10 Théorème
Soit
Preuve
En reprenant les notations de
III.1.6
, on remarque que
Supposons au contraire que
Supposons au contraire que
III.1.11 Remarque
Le déterminant est toujours une expression polynomiale des coordonnées (s'exprime comme produits et sommes des coordonnées de la matrice)III.1.12 Exemple
Calculer le déterminant deNotons
III.1.13 Proposition
Le déterminant d'une matrice triangulaire est le produit de ses coefficients diagonaux.
Preuve
Remarquer que le déterminant est nul ssi un des coefficient diagonaux est nul ssi la matrice triangulaire n'est pas inversible.
Dans ce cas d'une matrice inversible, le calcul est direct, sur le même modèle que l'exemple, que la matrice soit triangulaire inférieure ou supérieure.
Dans ce cas d'une matrice inversible, le calcul est direct, sur le même modèle que l'exemple, que la matrice soit triangulaire inférieure ou supérieure.
III.1.14 Exemple
Trouver à quelle condition surAprès l'opération
Finalement
III.1.15 Méthode
Une première méthode de calcul du déterminant :- Echelonner la matrice par opérations élémentaires (attention à la valeur du déterminant qui change parfois)
- Calculer le produit des coefficients diagonaux.
III.2 Propriétés calculatoires
III.2.1 Théorème
Soient
Preuve
Si
Sinon, considérons
Alors
Ainsi
On prouve l'affirmation générale par une récurrence immédiate.
Sinon, considérons
Alors
Ainsi
On prouve l'affirmation générale par une récurrence immédiate.
III.2.2 M-Attention
On a surtout pasIII.2.3 Corollaire
SiDans ce cas, on a également
Preuve
On a directement
III.2.4 Théorème
SoitPreuve
Hors programme
- On a
- Soit
Un calcul direct montre que
Ainsi le théorème est vrai pour les matrices élémentaires. - Rappelons que l'on suppose
Alors
III.2.5 Conséquences
On peut maintenant effectuer des opérations élémentaires sur les lignes au même titre que sur les colonnes, avec les mêmes effets.III.2.6 Théorème
Soit
Preuve
Admis.
Une idée de preuve (un peu pénible, mais pas si difficile) : on reprend les notations de
III.1.6
et on prouve le premier point pour
III.2.7 Tableau des signes
On résume souvent les signes qui apparaissent dans cette formule parIII.2.8 Exemple
Calculer le déterminantIII.2.9 Méthode
Une deuxième méthode de calcul du déterminant : Appliquer bêtement une des formules précédente.Une bonne idée sera de faire apparaître des 0 sur une ligne ou colonne pour réduire le nombre de termes dans le développement.
III.2.10 Exemple
Calculer le déterminantOn effectue, pour
III.2.11 Corollaire
SoitPreuve
Immédiat par récurrence sur la taille de
III.3 Déterminant et espace vectoriel
III.3.1 Définition
Soit
III.3.2 Lien avec la géométrie
Ce que l'on appelait déterminant d'une famille dansIII.3.3 Proposition
Soit
III.3.4 Exercice
Que vautIII.3.5 Exemple
Montrer queIII.3.6 Théorème
Deux matrices carrées semblables ont le même déterminant.
Preuve
Posons a
On a alors
On a alors
III.3.7 Invariants
Nous voilà avec 3 invariant de changement de base pour les endomorphismes : le rang, la trace et le déterminant.III.3.8 Définition
Soit
III.3.9 Exemple
On considère l'applicationEn prenant
III.3.10 Proposition
Soient
- Pour