Dans tout ce cours,
I Fonctions à valeurs dans
En pratique,
I.1 Norme, distance
I.1.1 Définition
Si
I.1.2 Proposition
- Le produit scalaire est symétrique (
- La norme vérifie :
- Pour
Les trois dernières propriétés sont appelées inégalité triangulaire
I.2 Continuité, dérivabilité
I.2.1 Définition
Soit
Dans le cas où
I.2.2 Proposition
Soit
Preuve
Pour
Ainsi SI
Réciproquement, observons que
Ainsi SI
Réciproquement, observons que
I.2.3 Remarque
On retrouve le fait (connu) que la continuité des fonctions à valeurs complexes est équivalente à celles des parties réelle et imaginaire. De manière plus générale,I.2.4 Définition (Dérivabilité)
La définition de la dérivabilité (tout court, à gauche ou à droite) est mot pour mot la même que pour des fonctions à valeurs réelles. Seule change la définition du symboleQuand
I.2.5 Cinématique
Si la fonctionI.2.6 Proposition
I.2.7 Exemple
I.2.8 Proposition
L'application
Preuve
Le vérifier sur chaque coordonnée.
I.2.9 Proposition
Soient
- Si
- (cas
- (cas
I.2.10 Exemple
SoitI.3 Taylor-Young
I.3.1 Dérivées d'ordre supérieur
On peut étendre de manière similaire (en reprenant les même définitions, puis on constate qu'il suffit de vérifier la propriété sur les fonctions coordonnées) les notions de dérivées d'ordreI.3.2 Combinaison linéaire, produit
Les formules de dérivéeI.3.3
Dans la suite du chapitre, la notation
I.3.4 Théorème (Taylor-Young)
Soit
II Etude de courbes
II.1 Courbes dans
II.1.1 Définition
Une courbe paramétrée de classe
II.1.2 Exemple
Quel est le support de la courbeOn note souvent
II.1.3 Définition
Soit
II.1.4 Courbes représentatives
SoitLe support de
Question subsidiaire : que dire de la courbe paramétrée
II.2 Domaine d'étude
Très souvent, il faudra calculer
II.2.1 Résumé des symétries connues
Notons| Coordonnées de
| |
| symétrique de
| |
| symétrique de
| |
| symétrique de
| |
| symétrique de
| |
| symétrique de
| |
| translaté de
|
II.2.2 Réduction du domaine d'étude
NotonsDonnons une liste non exhaustive des transformations classiques
| Forme de D | Point à calculer | Domaine réduit |
| Quelconque | sur une période, souvent
| |
| centré en 0 | ||
II.2.3 Exemple
Donnons un domaine d'étude de- Le calcul de
II.3 Tangentes, variations
Maintenant que nous disposons d'un domaine d'étude raisonnable, il nous faut tracer l'allure du support. Pour cela nous allons déterminer si la courbe se ``dirige'' vers la gauche ou la droite (
II.3.1 Etude des variations
Il s'agit là simplement de donner un tableau de variations complet pourII.3.2 Cordes
La corde passant par les points (distincts)II.3.3 Définition
Soit
La demi-tangente à gauche de
II.3.4 Théorème
SiPreuve
D'après le théorème de Taylor-Young, et par continuité de la norme,
II.3.5 Exemple
Reprenons| 0 | |||||
| 0 |
On remarque qu'en
Finalement, en
II.4 Tracé
II.4.1 Méthode
- Placer tous les points étudiés dans la phase précédente, ainsi que les tangentes en ces points.
- Tracer la courbe passant par ces points, tangente à ses tangentes. Le tracé doit respecter les variations.
- Effectuer les symétries dans l'ordre inverse de leur découverte.
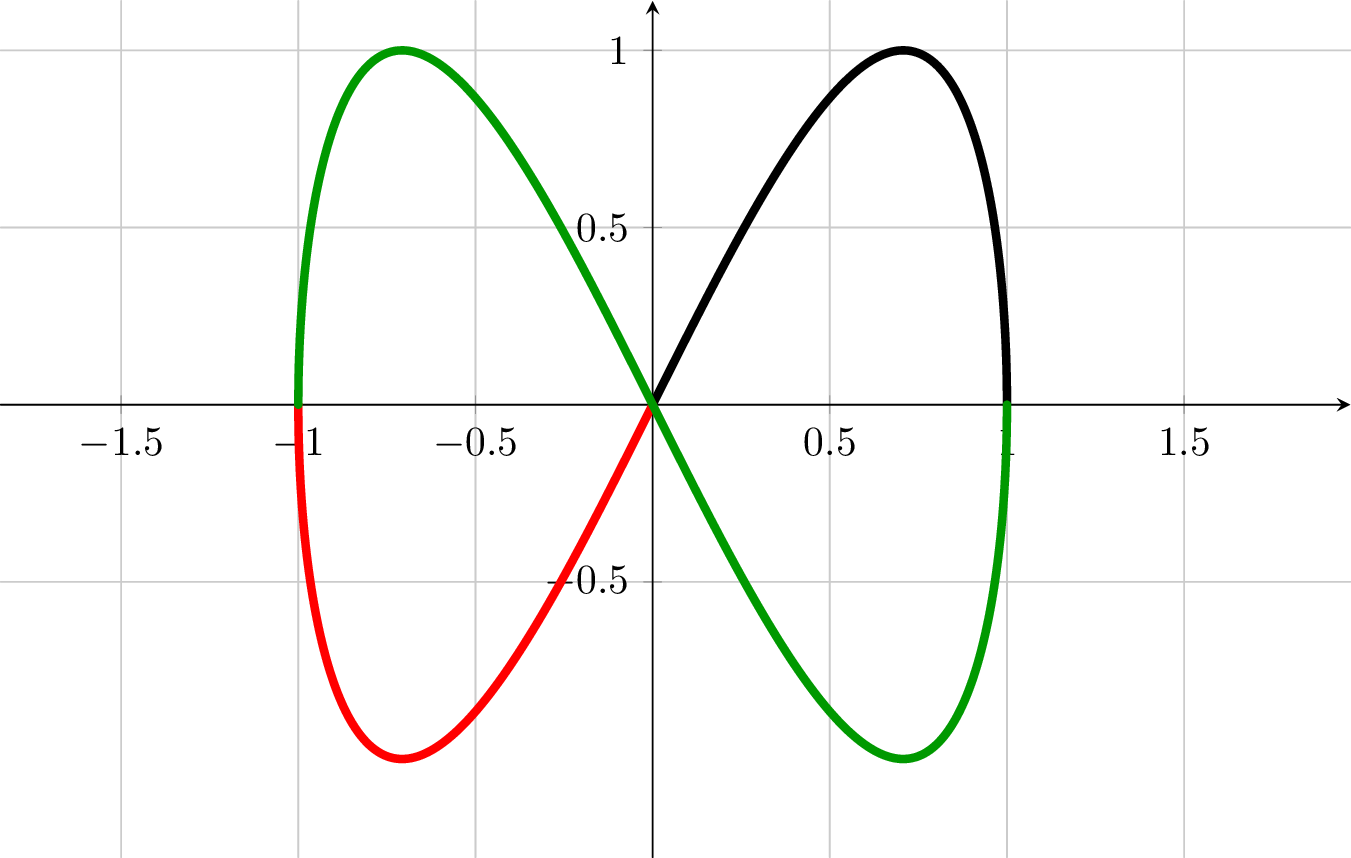
II.4.2 Exemple
Toujours pour la courbe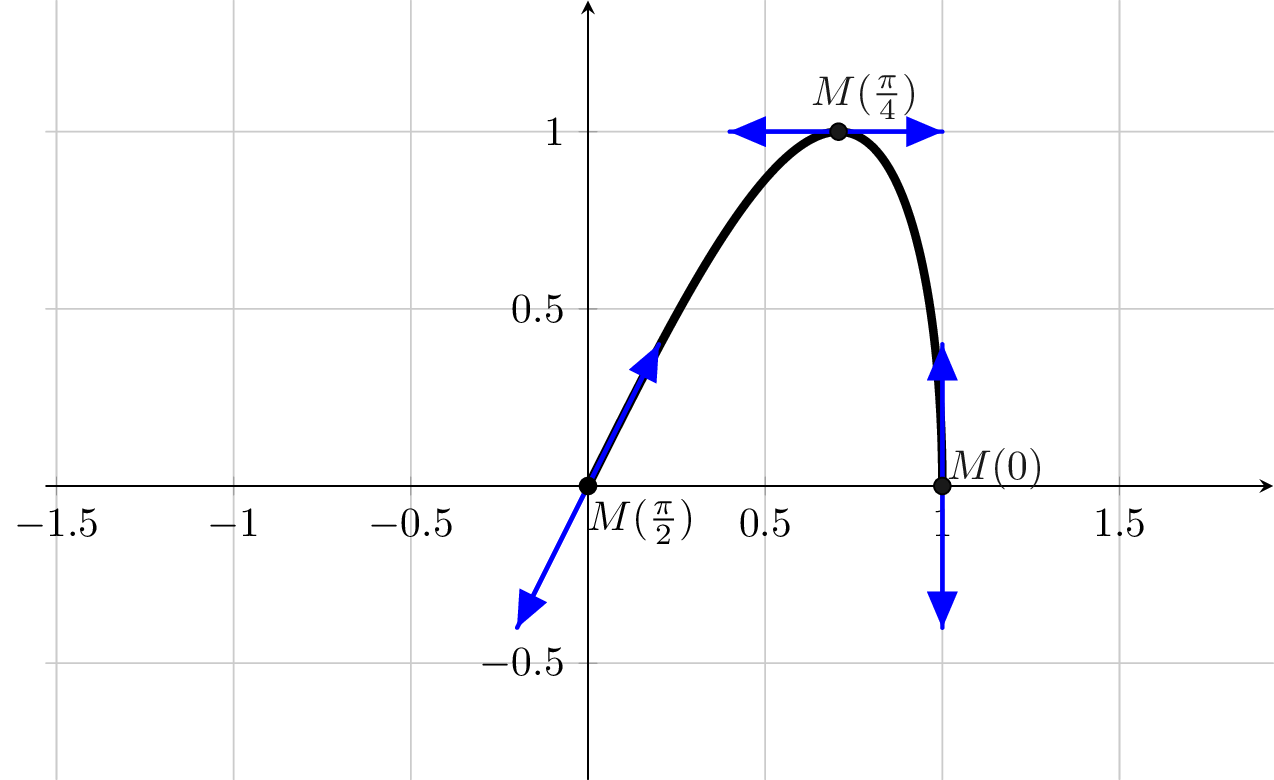
On place ensuite les symétrique des 3 points et 3 tangentes par rapport à
II.5 Étude en un point
Le cadre ici est d'étudier plus particulièrement l'allure de la courbe au voisinage du point
II.5.1 Continuer à dériver
Le raisonnement du théorème II.3.4 s'étend sans difficulté cas le cas oùAlors dans le repère
Plus précisément, dans
- Si
- Si
- on adapte les raisonnements dans les cas impairs pour trouver les 4 cas du points suivant.
II.5.2 Cas général
Suivant la parité de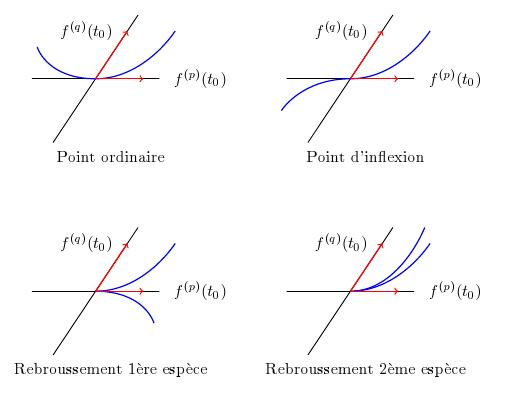
II.5.3 Méthode
Pour étudier l'allure d'une courbe au voisinage d'un point de paramètre- Trouver le pus petit entier
- Trouver le plus petit entier
II.5.4 Cas p=1, q=2
La vitesse et l'accélération ne sont pas colinéaires. C'est le cas le plus classique. Le point est dit birégulier . Dans ce cas la vitesse donne la direction de la tangente et l'accélération le sens de ``courbure''.II.5.5 En pratique
On peut tout à fait utiliser un développement limité deII.5.6 Exemple
Etudier la tangente au point de paramètre 0 de- On a
Pour finir, - Donnons des développements limités des fonctions
Ainsi, comme
II.5.7 Exercice
Trouver en fonction deII.6 Branches infinies
II.6.1 Définition
Soit
- Une des limite est infinie et l'autre finie : on obtient une asymptote qui est horizontale (lorsque seulement
- Ces deux limites sont infinies.
- Si
- Si
- Si
- si
- sinon on dit que
- si
- Si
II.6.2 Illustration
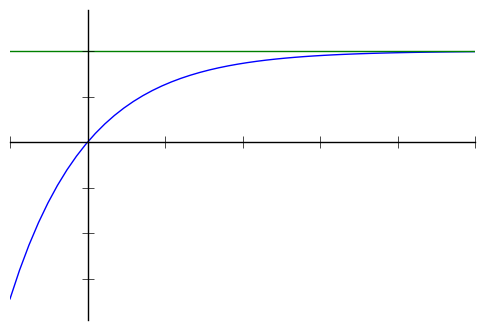
II.6.3 Exemple
Etudier les branches infinies dePassons sur l'étude des variations et des limites qui ne présente pas de difficulté particulières. On trouve le tableau suivant.
| 0 | 0 | |||||||||||||||
- Lorsque
Ainsi on observe une asymptote horizontale d'équation - Le raisonnement et le résultat sont exactement les mêmes lorsque
- Lorsque
Ainsi, on observe une asymptote verticale d'équation - Étudions la branche infinie lorsque
Soit
Remarquons que la limite est la même en
Maintenant
On a factorisé le polynôme
Finalement, lorsque
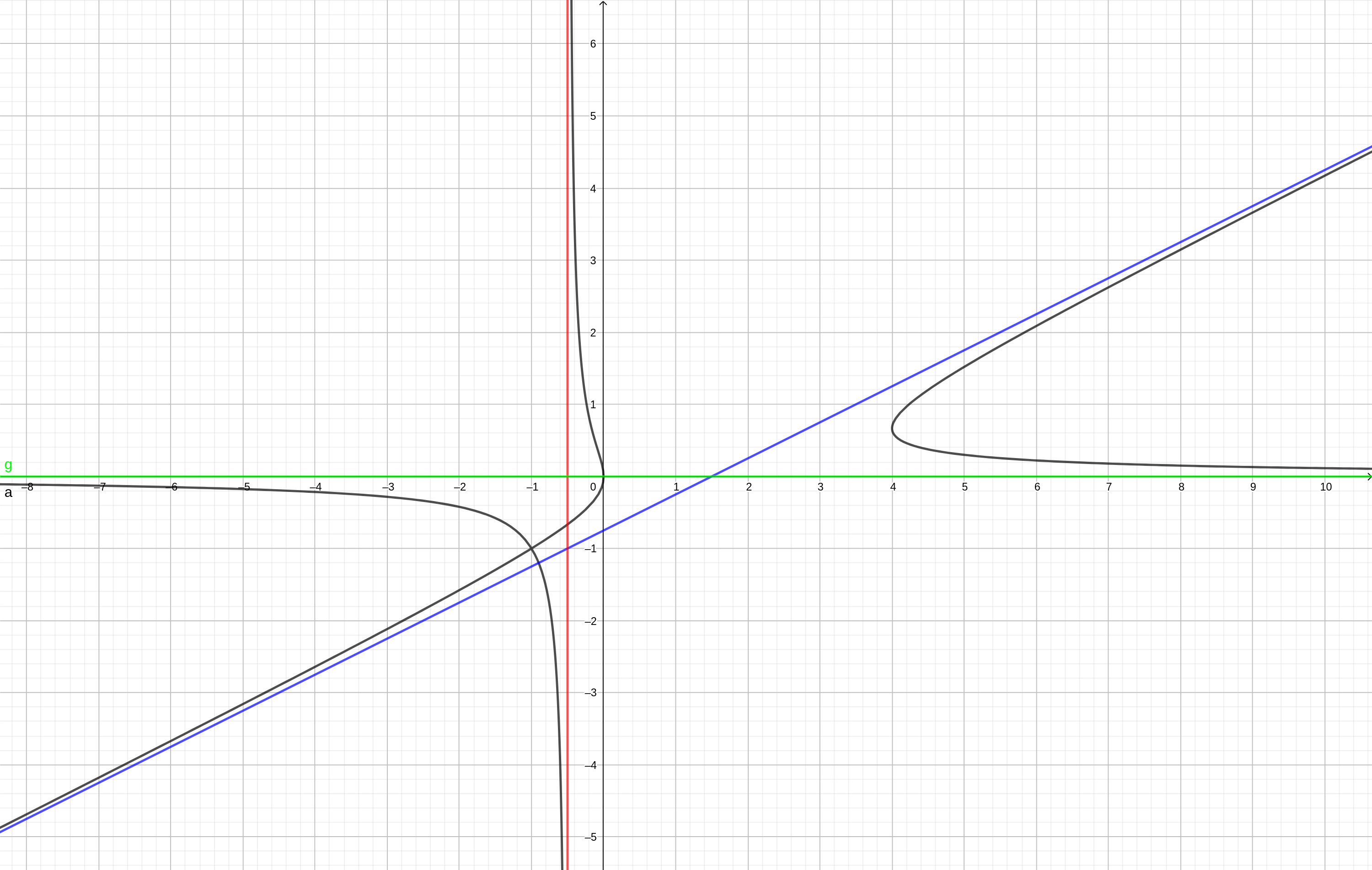
Sur le tracé qui suit, on a représenté la courbe en noir, l'asymptote verticale en rouge, l'asymptote horizontale en vert et l'asymptote oblique en bleu. Plusieurs remarques.
- La partie de courbe pour
- Pour
- Pour
II.6.4 Exercice
Sur le tracé précédent, on observe un point double, par lequel la courbe passe deux fois. ChercherIndication : faire apparaître la quantité
II.7 Plan d'une étude
On pose- Souvent, l'intervalle de définition de
- Définir ensuite un domaine d'étude le plus restreint possible en utilisant les symétries des expressions pour
- Déterminer les variations et les limites de
- Exhiber les tangentes "intéressantes" ainsi que les points singuliers s'il y en a.
- Etudier les branches infinies éventuelles.
- Tracer la courbe en utilisant toutes les informations précédemment glanées.
- Repérer s'il y a des points
multiples
(par lesquels la courbe passe plusieurs fois) et les déterminer en trouvant