Dans ce chapitre
I Espaces vectoriels
I.1 Sous-espaces et dimension
I.1.1 Définition
Soit
- On dit que
- Dans le cas où
I.1.2 Dimensions usuelles
I.1.3 Remarque
Plus généralement, siI.1.4 Proposition (Formules de dimension)
On considère- Si
I.1.5 Rappel
Dans un espace de dimension fini,- Si
- Si
I.1.6 Théorème
Soit
Preuve
Une idée de la preuve (voir le cours de sup pour plus de détails) :
On considère une famille libre de cardinal maximal dans
On considère une famille libre de cardinal maximal dans
I.1.7 Exemple
On se sert très souvent de la deuxième partie de cette propriété pour prouver l'égalité de deux espaces.Considérons par exemple le plan
I.2 Supplémentaires
I.2.1 Définition
Soient
I.2.2 Exemple
DansDans
I.2.3 Famille génératrice
Si on dispose d'une familleAinsi, en dimension finie,
I.2.4 Exemple
On se place dansDonner une base de
On a
Alors
Deuxième méthode :
Finalement une base de
I.2.5 Définition
Soient
I.2.6 Caractérisation
On montre facilement (en sup) queI.2.7 Exemple
La preuve se fait par analyse-synthèse.- Notons
Alors
I.2.8 Théorème (Théorème de la base adaptée)
Soit
On a alors évidemment
Preuve
Soient
- On suppose dans un premier temps que
Montrons que - Supposons réciproquement que
Soit
On a immédiatement sous cette forme
Caractère libre. Soient
Finalement,
I.2.9 Corollaire
En dimension finie, tout sous-espace possède au moins un supplémentaire.Preuve
Il s'agit d'appliquer le théorème de la base incomplète à une base de
I.2.10 Théorème (Grassmann)
SoientPreuve
Une idée de la preuve : considérer
I.2.11 Corollaire
Dans un espace de dimension finie, on aPreuve
Utiliser la formule de Grassman :
I.2.12 Exercice
Caractériser (donner une ou des CNS sur) les espaces supplémentaires dansI.3 Hyperplans
I.3.1 Définition
Soit
I.3.2 Proposition
Les hyperplan de
I.3.3 Exemple
Les droites du plan, les plans dans l'espace. Remarquer les équations cartésiennes similaires dans ces cas.I.3.4 Hyperplans et équations
Si on considère un système à 1 équation etPar exemple,
I.4 Sommes directes d'espaces vectoriels
I.4.1 Définition-proposition
Soit
- La somme des espaces
C'est le sous espace de - On dit que la somme
Preuve
- Il s'agit de montrer que
Montrons que
Soit
Alors
Soit maintenant
De la même manière
ce qui prouve au passage que
On a alors - Comme la somme d'espaces est associative, la somme directe l'est aussi.
I.4.2 Remarque
Le casI.4.3 Exercice
Trouver 3 espacesI.4.4 Théorème
Soient
Ainsi il suffit de vérifier que le vecteur nul possède une unique écriture sous forme de somme.
Preuve
Si on suppose la somme directe, alors le vecteur nul s'écrit de manière unique comme
Réciproquement, supposons que
Si on a
Réciproquement, supposons que
Si on a
I.4.5 Exemple
Montrer que siOn a déjà
De plus, si on pose des
On a donc
I.4.6 Définition-proposition (Théorème de la base adaptée)
Soient
Une telle base de
Preuve
Procéder par récurrence sur le nombre d'espace, le cas
I.4.7 Remarque
- Observer le ssi, et surtout la réciproque. Il est facile de décomposer un espace en somme si on en connaît une base. Par exemple
- On obtient immédiatement
I.4.8 Pour les 5/2
Quels genre de sous-espaces sont forcément en somme directe ?Réponse : des espaces propres associés à des valeurs propres distinctes.
II Applications linéaires
II.1 Propriétés générales
II.1.1 Définition
Soient
Si
II.1.2 Exemple
Quelques exemples important (avec des notations évidentes) :D'autres plus géométriques : les projection (orthogonales ou non) et symétries, les rotations du plan et de l'espace.
II.1.3 Application canoniquement associée
SoitII.1.4 Proposition
- Quand elle existe, la composée de deux applications linéaire est linéaire.
- Quand elle existe, la bijection réciproque d'une application linéaire est linéaire.
II.1.5 Définition
Soit
- Son noyau est
- Son image est
II.1.6 Exemple
NotonsOn trouve
II.1.7 Proposition
Soient
Alors
Preuve
- Montrons que
Soient donc
Or - Montrons que
Soient
Alors
II.1.8 Rappels
Soit- Si
- Si
Pour une application linéaire
II.1.9 Équation linéaire
On dit d'une équation qu'elle est linéaire ssi elle est de la formePar exemple :
- le système de matrice
II.2 Applications linéaires et dimension
II.2.1 Proposition (Théorème d'isomorphisme)
Soit
Si
Preuve
On a
- Soit
Or on peut écrire
Donc
II.2.2 Théorème (Théorème du rang)
Soit
Preuve
Comme
II.2.3 Exemple
SiII.2.4 Corollaire
SoitII.2.5 Exemple (Polynômes interpolateur de Lagrange)
SoientL'application
En conséquence, si on fixe
Pour déterminer
Ensuite, la linéarité de
II.2.6 Corollaire
SoitII.2.7 Exemple
SoitOn a
II.2.8 Remarque
C'est le pendant du théorème qui énonce qu'une matrice est inversible ssi on trouve un inverse à gauche ou un inverse à droite.II.3 Espaces stables
II.3.1 Définition
Soit
II.3.2 Exemple
SoitSoit
Ainsi
II.3.3 Endomorphisme induit
SiAlors
II.3.4 Familles génératrices
SoitII.3.5 Exemple
Considérons l'applicationOn pose
Montrer que
Réponse : Le déterminant dans la base canonique de
On a
Ces calculs permettent d'écrire les matrices demandées
II.3.6 Théorème
Soit
- 0 représente la matrice nulle de
Preuve
On note
Supposons
Réciproquement, si
Supposons
Réciproquement, si
III Endomorphismes particuliers
III.1 Homothéties
III.1.1 Définition
Soit
III.1.2 Exemple
Deux homothéties très importantes : l'application nulle et l'identité.III.1.3 Matrice d'une homothétie
On considèreMatriciellement, la seule matrice semblable à
III.1.4 Commutation
Une homothétie commute avec tout endomorphisme.III.2 Projecteurs, symétries
III.2.1 Définition
Soit
III.2.2 Illustration
On représente les deux projections d'un vecteur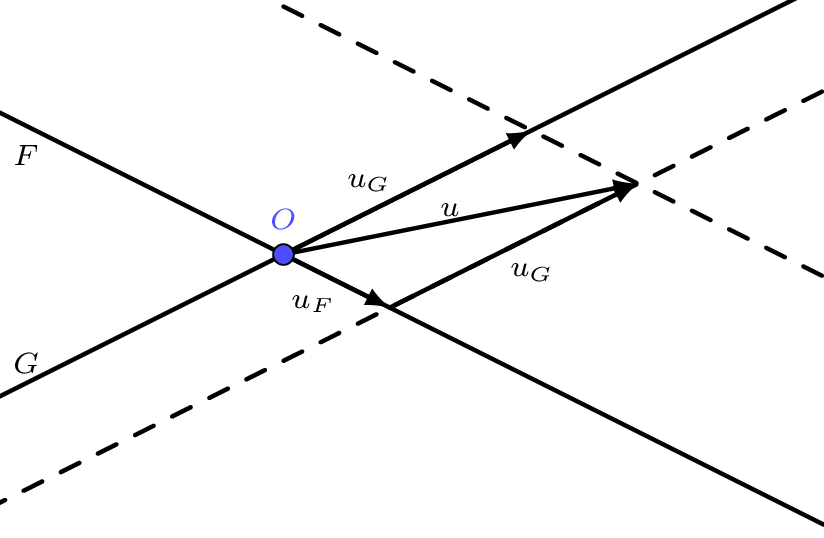
Remarquons qu'on a bien
III.2.3 Liens entre ces applications
- On a les liens important entre ces applications :
- Si
III.2.4 Méthode
Pour déterminer la projectionIII.2.5 Exemple
Soient
Ainsi
- On a
- On a
Finalement,
On constate que
III.2.6 Théorème
Soit
- Soit
- Réciproquement si
Preuve
- Prouvons tout d'abord la linéarité.
Soient
Soient
Alors
Evidemment,
Ensuite, avec les mêmes notations,
Si
Il reste à prouver que
Soit maintenant - On a d'abord
- Montrons maintenant que
- Analyse :
Supposons
que
Alors - Synthèse :
Réciproquement, posons
Montrons que
Cependant,
Conclusion : - Analyse :
Supposons
que
- Par définition d'un projecteur, et d'après notre analyse,
- On a d'abord
III.2.7 Exemple
Soit la matriceQuestion 5/2 : au vu de la matrice
Réponse :
Notons
Il s'agit du projecteur sur
Les 3 équations sont proportionnelles et donc
Réponse 5/2 :
III.2.8 Matrice dans une base adaptée
- On considère
- Même question dans le cas général
On trouve, en notation par bloc
car pour
III.2.9 Remarque
Pour un projecteurIII.2.10 Exemple
On considère l'applicationIII.2.11 Théorème
Soit
- Soit
- Réciproquement, soit
III.2.12 Exemple
DansIII.2.13 Matrice dans une base adaptée
Donner, avec les notations du théorème, la matrice deEn utilisant les même notation que le point correspondant sur les projecteurs
III.2.14 Exemple
Remarquons que la transposition est une symétrie. C'est même la symétrie associée au projecteur de l'exemple III.2.10III.3 Projection et espaces en somme directe
III.3.1 Définition
Soient
Le projeté du vecteur
III.3.2 Remarque
Si la somme directe desIII.3.3 Proposition
Avec les notations de la définition précédente
III.3.4 En pratique
Pour déterminer ces projections, on procède comme dans le cas d'espaces supplémentaires :- calcul de coordonnées dans une base adaptée si possible, et on regroupe par espace.
- analyse/synthèse s'il le faut.