Dans tout ce cours,
I Etude métrique
I.1 Longueur d'une courbe
I.1.1 Notion intuitive de longueur
La longueur de la courbe entre les points de paramètresI.1.2 Définition
SoientI.1.3 Exemple
- Calculer la longueur du cercle trigonométrique.
- Calculer la longueur de l'arc de la parabole
La longueur
On veut poser une nouvelle variable
Alors
Ainsi
Or on a
Finalement
On peut aisément vérifier en python
importscipy.integrateassciimportnumpyasnpdeff(t):returnnp.sqrt(1+4*t**2)sci.quad(f,0,2)# valeur approchée de l'intégrale de f entre 0 et 2np.sqrt(17)+np.log(4+np.sqrt(17))/4
I.1.4 Exemple
Longueur de la cycloïde surAlors la longueur cherchée est
On obtient donc
I.2 Abscisse curviligne
On considère maintenant
I.2.1 Définition
SoitA retenir :
I.2.2 Remarque
L'information connue a priori surI.2.3 Proposition
On considère une courbe régulièreL'abscisse curviligne d'origine
Preuve
Rappelons que l'application
Ainsi
De plus,
Comme
Ainsi
De plus,
Comme
I.2.4 Paramétrage par l'abscisse curviligne
NotonsI.2.5 Notation
La relation relationSi on paramètre
I.2.6 Proposition
Pour une courbe régulièreI.3 Repère de Frenet
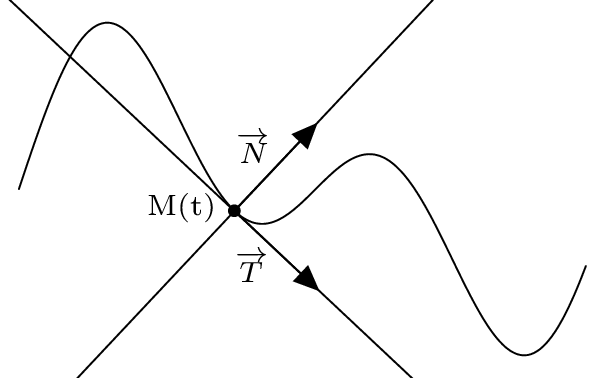
I.3.1 Définition
Soit
I.3.2 Exemple
On considère la courbeAlors, pour
Ainsi
Ainsi, à l'instant
Lien géogébra : Lancer la lecture sur le paramètre
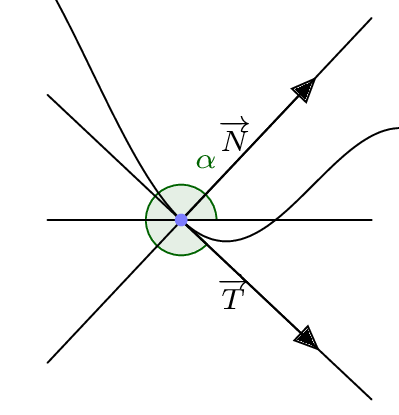
I.3.3 Théorème (Détermination angulaire)
Il existe une fonction
Preuve
Hors programme.
On considère la fonction
On considère la fonction
I.3.4 Illustration
I.3.5 Proposition
- On a alors
- Comme
I.3.6 Exemple
Déterminer la fonctionOn considère la courbe paramétrée associée
Reprenons la définition de
On cherche
Ainsi (et c'est cohérent avec le tracé),
I.4 Courbure
I.4.1 Définition
On appelle courbure la dérivée de la fonctionI.4.2 Interprétation
- Si
- Si
- Si
I.4.3 Théorème (Formules de Frenet)
On a
Preuve
On a
I.4.4 Exemple
Calculer l'expression du vecteur vitesse et du vecteur accélération en fonction deDe plus,
I.4.5 Exemple
- Courbure du cercle de centre
- Pour la cycloïde, sur
Ainsi
Donc
De plus,
I.4.6 Dans le repère de Frenet
Si on calculeHors,
Ainsi
I.4.7 Exercice
Traduire cette formule en fonction des fonctions coordonnéesII Enveloppe, développée
II.1 Courbe développée
II.1.1 Définition
Un point d'une courbe paramétrée est dit birégulier ssi les vecteurs vitesse et accélération en ce point ne sont pas colinéaires. On a donc (avec les notations classiques) les entiers
II.1.2 Proposition
Pour une courbe
Preuve
Il s'agit juste d'une redite du calcul de
II.1.3 Définition
Soit
On peut évidemment repérer
II.1.4 Interprétation
Au point de paramètreII.1.5 Définition
Le lieu des centres de courbure d'une courbe s'appelle la courbe développée. C'est la courbe
II.1.6 Exemple
Prenons comme courbe l'ellipseTrouvons
On a
Ainsi
Maintenant, le centre de courbure vérifie
Lien géogébra : Animer
II.1.7 Exemple
Calculons la développée de la cycloïde (surIci
Ainsi
II.2 Enveloppe
II.2.1 Définition
Soit
II.2.2 Mise en équation
On se donne un pointsOn cherche donc à écrire
On suppose les fonctions en jeu dérivables et on obtient
II.2.3 Proposition
Une enveloppe de la famille
II.2.4 Exemple
Cherchons l'enveloppe de la famille de droitesPour
On cherche
Pour
On peut tracer au remarquer que tous les points de la courbe vérifient
De plus, si on prend
Finalement, on peut paramétrer notre quart d'hyperbole pour être la courbe enveloppe calculée et le tracé est maintenant immédiat.
Lien géogébra : Lancer la lecture du paramètre
II.2.5 Proposition
Soit
On peut remplacer le vecteur
Preuve
Notons
Il reste à montrer que les normales sont tangentes à
Il reste à montrer que les normales sont tangentes à
II.2.6 Conséquence géométrique
Les normales àII.2.7 Exemple
Calculons la développée de la demi-hyperbole paramétrée parOn note
On cherche donc une courbe notée
Cette équation peut s'écrire
Finalement,