On fixe deux entiers naturels
Le cadre général est ici de considérer des fonctions
Dans le cas
I Continuité
I.1 Domaines de définition
I.1.1 Définition
Soit
- La boule ouverte de rayon
- La boule fermée de rayon
I.1.2 Illustration
Lien avec la forme du domaine de convergence d'une série entière. On illustre ces définitions dans le cas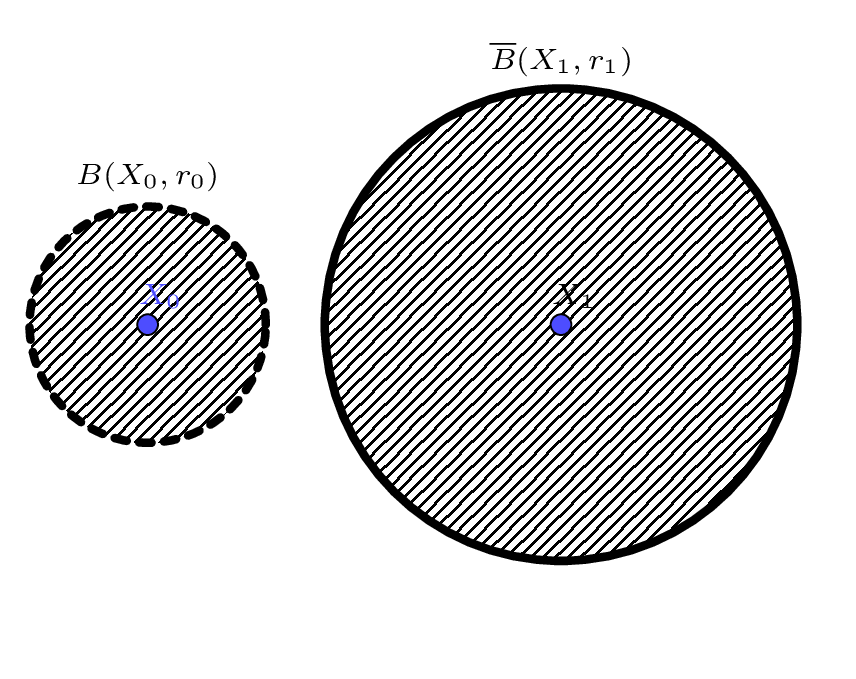
I.1.3 Définition-proposition
Soit
- il existe
- pour tout
- il existe
Preuve
On note
Soit
Or, pour
Alors
Comme
Il suffit d'appliquer 2 à
I.1.4 Exemple
Toute boule ouverte ou fermée est bornée.I.1.5 Définition
Soit
- On dit que
- On dit que
I.1.6 Exemple
- Toute boule ouverte est un ouvert.
- Toute boule fermée est un fermé.
- Une couronne ouverte,
- Le demi-plan
I.1.7 Interprétation intuitive
Dans un ouvertUne première approche est de voir que pour un ouvert la ``frontière'' est exclue alors qu'elle est inclue dans un fermé.
I.1.8 Définition
Soit
- On dit que
- On dit que
- On dit que
- On dit que
I.1.9 Illustration graphique
Tracer les différents ensembles pourI.1.10 Proposition
Soit- Tout point de
- Tout point intérieur à
Preuve
Simple jeu avec les définitions. Bon exercice théorique pour vérifier la connaissance de celles-ci.
I.2 Fonctions continues
I.2.1 Représentation graphique
On considère une fonctionI.2.2 Définition
Soit
- Soit
Il faut comprendre - Soit
I.2.3 Théorème
Soit
- On note
- Une somme de fonctions continues est continue, le produit d'une fonction continue par un réel est continue (
- Si
- Soit
Preuve
Reprendre les preuves de 1ère année en adaptant les notations.
I.2.4 Exemple
On considère des fonctions de deux variables.
I.2.5 Applications partielles
SoitLes application partielles de
SI
Indication : On se place sur l'arc paramétré
I.2.6 Théorème (Image d'un fermé borné)
Soit
- Si
- Si
Preuve
Totalement hors programme.
Posons
Soit
Finalement,
Posons
- Montrons que le fait que
Ainsi - Maintenant on a
En posant - Contradiction
Soit
Finalement,
I.2.7 Remarque
Il s'agit de la version plusieurs variables du théorème important : l'image d'un segment par une application continue est un segment.I.2.8 Exemple
Voici des exemples de parties fermées et bornées :II Dérivées partielles
Ici, pour simplifier la rédaction, on fixeII.1 Dérivabilité
II.1.1 Définition
Soit
On dit que
On définit de même
II.1.2 Remarque
- Il s'agit toujours de se ramener à une fonction d'une variable, en fixant les autres au point qui nous intéresse.
II.1.3 Attention
Même siII.1.4 Exemple
Calculer les dérivées partielles, si possible, pour :
II.1.5 Définition
Soit
II.1.6 Exemple
Les fonctions précédentes sont de classeII.1.7 Définition
Soit
En physique, le gradient est parfois noté
II.1.8 Exemple
Calculer le gradient de la première fonction de l'exemple précédent. Attention à ne pas confondre avec les vecteurs obtenus en dérivant (partiellement) une fonction avecII.2 Taylor-Young
Cette fois, on énonce les théorèmes dans le cas
II.2.1 Théorème
Soit
Preuve
Admis.
II.2.2 Le petit o
Il s'agit ici d'une fonction de 2 variablesII.2.3 Exemple
Ecrire la formule dans le cas de 3 variables.II.2.4 Corollaire
Une fonction de classeII.2.5 Cas n = 1
Dans le cas oùou encore, en notant
II.2.6 Proposition (Composition)
Soit
Si
Preuve
Il s'agit d'appliquer la formule de Taylor-Young à
On lit la valeur de
Or
On lit la valeur de
Or
II.2.7 Exemple
On considèreII.2.8 Proposition (Composition, changement de variables)
On considère
Si on note
Preuve
On dérive par rapport à une seule variable, que l'on peut noter
II.2.9 Proposition (Un exemple)
Avec les mêmes notations que la proposition précédente.On note
Alors
II.2.10 Exemple
SoitOn trouve
II.2.11 Gradient en coordonnées polaires
On reprend les mêmes notation qu'à l'exemple précédent. On cherche à exprimer le gradient en un pointOn convient de noter seulement les dérivées partielles dans ce qui va suivre, en considérant qu'on évalue ces dérivées en
II.2.12 Définition (Dérivées d'ordre supérieur)
Comme pour les fonctions d'une variable, on peut évidemment continuer à dériver des dérivées partielles si elles sont encore dérivables.La notation est la suivante :
II.2.13 Exemple
SoitCalculer
II.2.14 Théorème (Théorème de Schwarz)
Si
II.3 Equations aux dérivées partielles
II.3.1 Exemple
On souhaite résoudre l'équation (oùOn a donc
Ainsi
Finalement, les solutions sont de la forme
II.3.2 Exemple
Chercher les solutionsOn pose
On pose
Ainsi
Finalement,
II.3.3 Exercice
Résoudre l'équation précédente par changement de variableII.3.4 Exemple
On considère l'équation de la chaleurRésoudre en posant
III Extremas
III.1 Points critiques
Cette fois on supposeIII.1.1 Définition
Soit
III.1.2 Exemple
Tracer la surface représentative deLien géogébra : Constater les valeurs minimales et maximales le long de
III.1.3 Définition
Soit
III.1.4 Exemple
- Cas des fonctions numériques :
- Soient
III.1.5 Interprétation graphique
- Dans le cas d'une fonction d'une variable, il s'agit de la présence d'une tangente horizontale (qui n'est garantie que lorsque la dérivée s'annule en un point qui n'est pas une borne de l'intervalle de définition).
- Dans le cas d'une fonction de deux variable, le plan tangent en un point critique est horizontal. Il possède une équation de la forme
III.1.6 Proposition
Soit
Si
Preuve
Notons
Vu que
On raisonne de même pour chaque dérivée partielle.
Vu que
On raisonne de même pour chaque dérivée partielle.
III.1.7 Exemple
Réponse :
Sur l'ouvert
On paramètre les points de la frontière par
Ainsi,
III.2 Matrice hessienne
III.2.1 Théorème (Taylor-Young, ordre 2)
Soit
Preuve
Admis
III.2.2 Définition
Soit
Soit
III.2.3 Réécriture de la formule de Taylor
On se place dans le même cadre que le théorème, on noteOn a alors
III.3 Etude des extrema
III.3.1 Cas d'un point critique
On se place dans le cadre oùOn a alors
Réduisons la matrice
Alors pour
Ainsi
- Cas λ, μ > 0 :
f atteint un minimum local en X0.
- Cas λ, μ < 0 :
f atteint un maximum local en X0.
- Cas λ, μ de signes stricts opposés :
f n’a ni maximum local ni minimum local en X0. On a un point selle ou point col en X0.
- Cas λμ = 0 :
on ne peut pas conclure a priori. Il faut calculer les deux valeurs propres.
III.3.2 Théorème
Soit
Notons également
- Si
- si
- si
- si
- Si
- Si
III.3.3 Exemple
ConsidéronsTout d'abord,
- Pour
On a trois solutions :- Calculons maintenant la hessienne au point
III.3.4 Exemple
Etudier les extrema deLes points critiques de
En
Calculons la matrice hessienne.