I Coniques
I.1 Définition monofocale
I.1.1 Définition
Soit
- si
- si
- si
Dans toute cette première partie du cours, nous conserverons ces notations.
I.1.2 Repère focal
On considère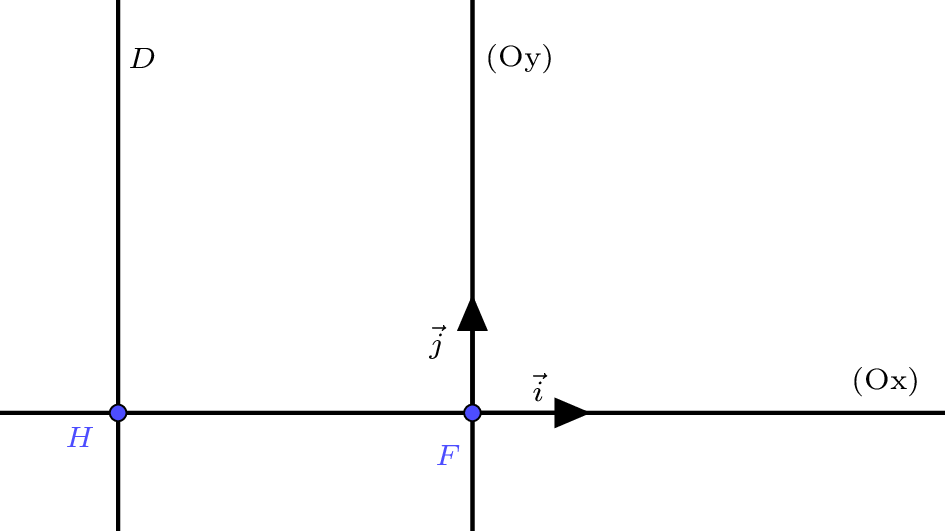
I.2 Équation cartésienne dans le repère focal
On cherche ici les pointsNotons
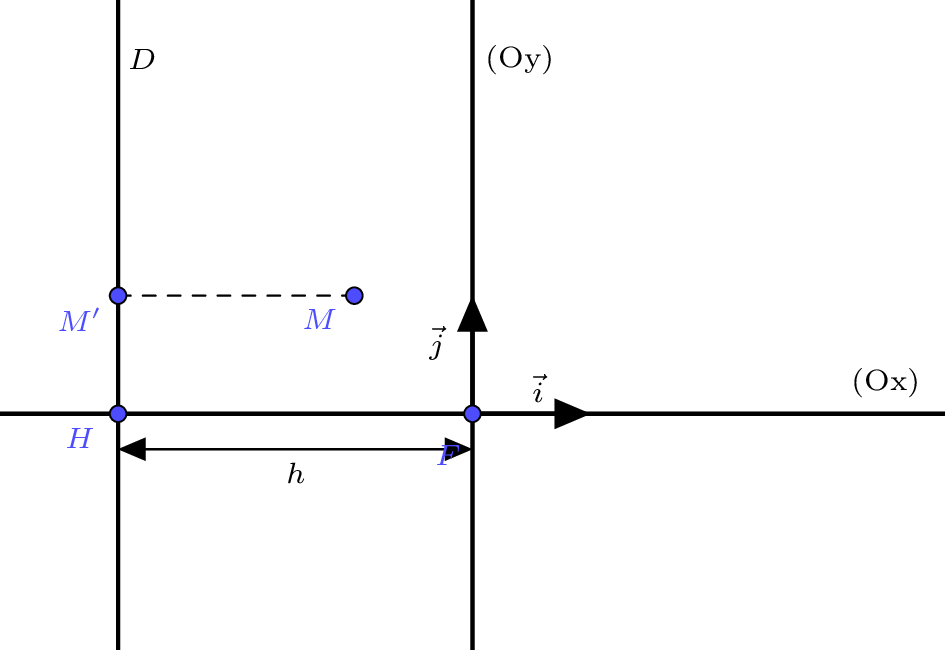
On note classiquement
I.2.1 Proposition (Intersection avec l'axe focal)
Soit- Si
- Si
Preuve
On cherche les point
- Cas
- Cas
Le discriminant est
I.2.2 Milieu des sommets
Dans le casI.2.3 Sommets
Lien géogébra : positions des sommets et de leur milieuOn peut retenir que les sommets d'une ellipse sont positionnés de part de d'autre du foyer, d'un même côté de la directrice et les sommets d'une hyperbole sont positionnés de chaque côté de la directrice et du même côté du foyer.
I.3 Équations réduites
I.3.1 Théorème (Équation réduite d'une parabole)
SoitEn notant
Dans le repère au sommet, le foyer est de coordonnées
Preuve
Soit
On a donc
De plus,
On a donc
De plus,
I.3.2 Tracé
Nous somme maintenant en mesure de tracer une parabole de directrice et foyer donnés, en notant que son équation dans le repère au sommet est également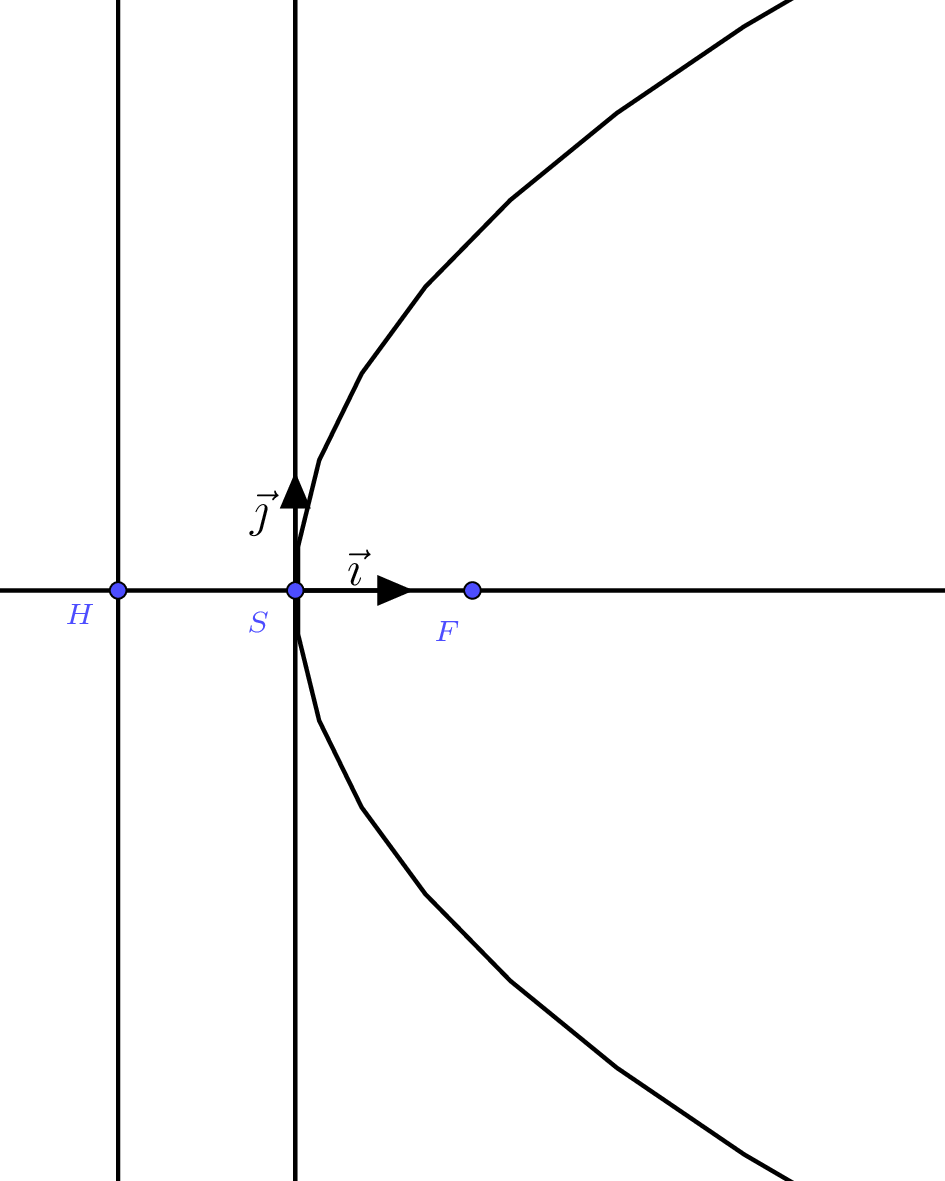
I.3.3 Théorème (Équation réduite d'une ellipse)
SoitL'équation réduite de
Preuve
Commençons par poser
On a alors
On a alors
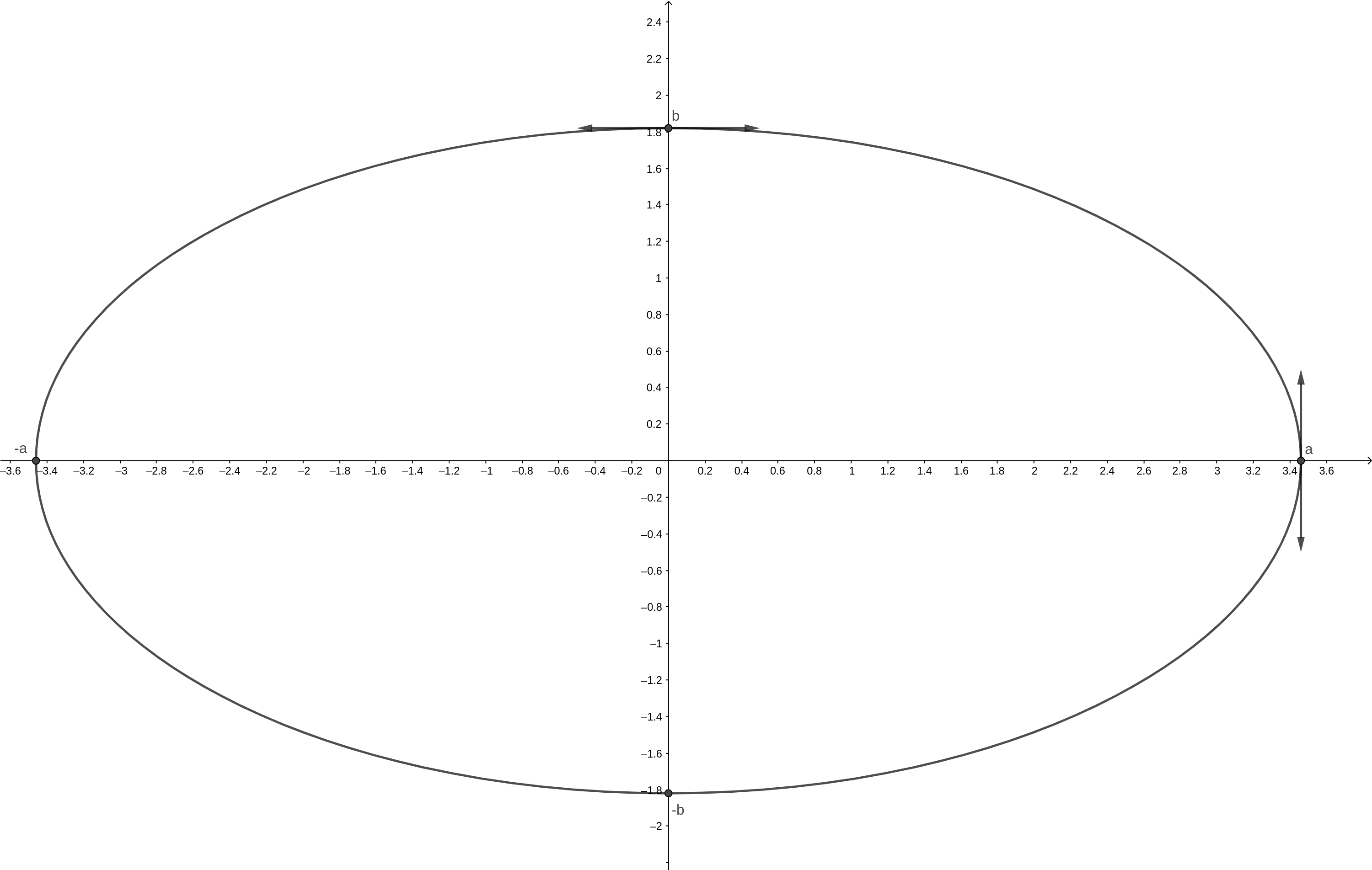
I.3.4 Tracé
Cette fois nous n'avons pas de méthode directe pour tracer une ellipse. Par contre on peut prouver facilement que les sommets sont de coordonnéesI.3.5 Théorème (Équation réduite d'une hyperbole)
SoitL'équation réduite de
Preuve
Elle est tout à fait similaire à la preuve précédente, excepté que cette fois
On trouve
On trouve
I.3.6 Sommets
Encore une fois, les sommets sont de coordonnéesI.3.7 Proposition
Une ellipse et une hyperbole sont des courbes symétriques par rapport à :- chacun des axes du repère central
- leur centre
Preuve
Dans le repère central, le symétrique d'un point
De plus, en revenant à l'équation réduite de
On prouve de même les symétries par rapport aux axes.
De plus, en revenant à l'équation réduite de
On prouve de même les symétries par rapport aux axes.
I.3.8 Conséquence
Le pointPour ce couple de foyer/directrice, la convention pour le repère focal est de prendre
I.4 Études des courbes implicites
I.4.1 Définition
On dit qu'une courbeDans ce cas les points de
I.4.2 Exemple
Les ellipses et hyperboles que nous venons d'étudier sont des courbes définies par une équation implicite.On ne peut pas isoler
I.4.3 Théorème
SoitSoit
- On dit que
- Si
Preuve
Admis pour l'instant. Nous verrons une idée de preuve dans le chapitre sur les fonctions de plusieurs variables.
I.4.4 Proposition (Tangentes à une ellipse)
On considère une ellipseSoit
Preuve
Posons
Alors
Comme
On a maintenant, pour
Alors
Comme
On a maintenant, pour
I.4.5 Tangentes particulières
Aux points de coordonnéesI.4.6 Proposition (Tangentes à une hyperbole)
On considère une hyperboleSoit
Preuve
Tout à fait similaire.
I.4.7 Tangentes aux sommets
Les tangentes aux sommets d'une hyperbole (de coordonnéesI.4.8 Allure provisoire
Placer dans chacun des deux cas les points connus ainsi que les tangentes obtenues (on se place dans le repère central). On pourra prendreOn pourrait presque tracer l'ellipse, il nous manque des informations pour l'hyperbole.
II Courbes paramétrées
II.1 Courbes dans
II.1.1 Définition
Une courbe paramétrée de classe
II.1.2 Exemple
Quel est le support de la courbeII.1.3 Remarque
On note souventII.1.4 Définition
Soit
II.1.5 Courbes représentatives
SoitLe support de
Question subsidiaire : que dire de la courbe paramétrée
II.1.6 Proposition (Paramétrisations des coniques)
Considérons l'ellipse- La demi hyperbole
Preuve
Il s'agit de paramétrer ces courbes implicites.
Soit
Soit
- Montrons d'abord un résultat intermédiaire.
Soient
Il suffit maintenant d'appliquer ce résultat pour obtenir un raisonnement similaire au point 1).
II.2 Domaine d'étude
Très souvent, il faudra calculer
II.2.1 Résumé des symétries connues
Notons| Coordonnées de
| |
| symétrique de
| |
| symétrique de
| |
| symétrique de
| |
| symétrique de
| |
| symétrique de
| |
| translaté de
|
II.2.2 Réduction du domaine d'étude
NotonsDonnons une liste non exhaustive des transformations classiques
| Forme de D | Point à calculer | Domaine réduit |
| Quelconque | sur une période, souvent
| |
| centré en 0 | ||
II.2.3 Exemple
Donnons un domaine d'étude de- Le calcul de
II.2.4 Exemple
- Pour notre ellipse, on peut étudier
- L'étude de l'hyperbole se fera sur
II.3 Tangentes, variations
Maintenant que nous disposons d'un domaine d'étude raisonnable, il nous faut tracer l'allure du support. Pour cela nous allons déterminer si la courbe se ``dirige'' vers la gauche ou la droite (
II.3.1 Etude des variations
Il s'agit là simplement de donner un tableau de variations complet pourII.3.2 Exemple
Dressons les tableaux pourNous sommes maintenant en mesure de tracer l'ellipse.
II.3.3 Cordes
La corde passant par les points (distincts)II.3.4 Définition
Soit
La demi-tangente à gauche de
II.3.5 Théorème
SiPreuve
D'après le théorème de Taylor-Young, et par continuité de la norme,
II.3.6 Exemple
Reprenons| 0 | |||||
| 0 |
On remarque qu'en
Finalement, en
II.4 Tracé
II.4.1 Méthode
- Placer tous les points étudiés dans la phase précédente. Attention, on ne voit pas a priori les valeurs de
- Placer les tangentes : vu qu'on connaît déjà un point, un vecteur directeur suffit.
- Tracer la courbe passant par ces points, tangente à ses tangentes. Le tracé doit respecter les variations.
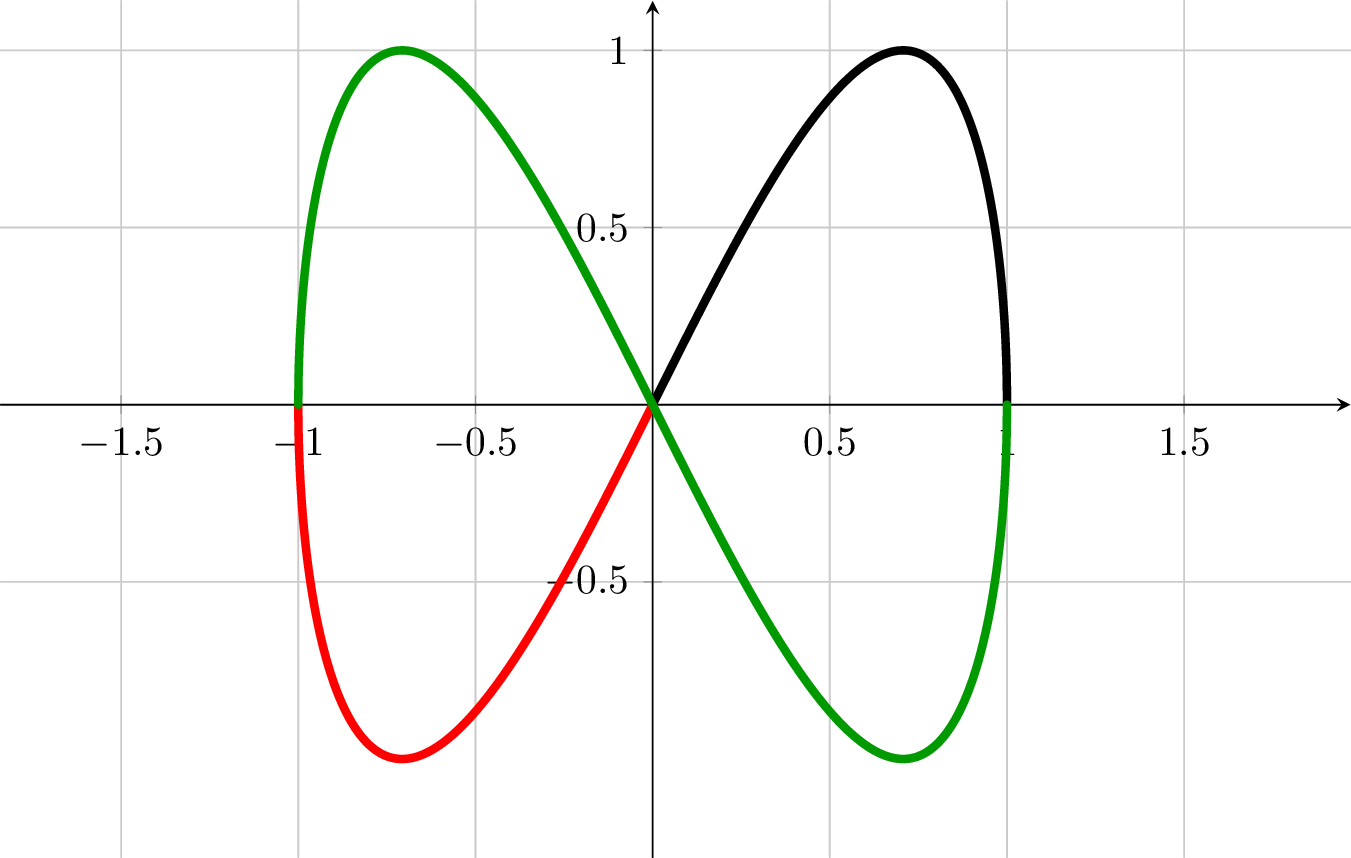
- Effectuer les symétries dans l'ordre inverse de leur découverte.
II.4.2 Exemple
Toujours pour la courbe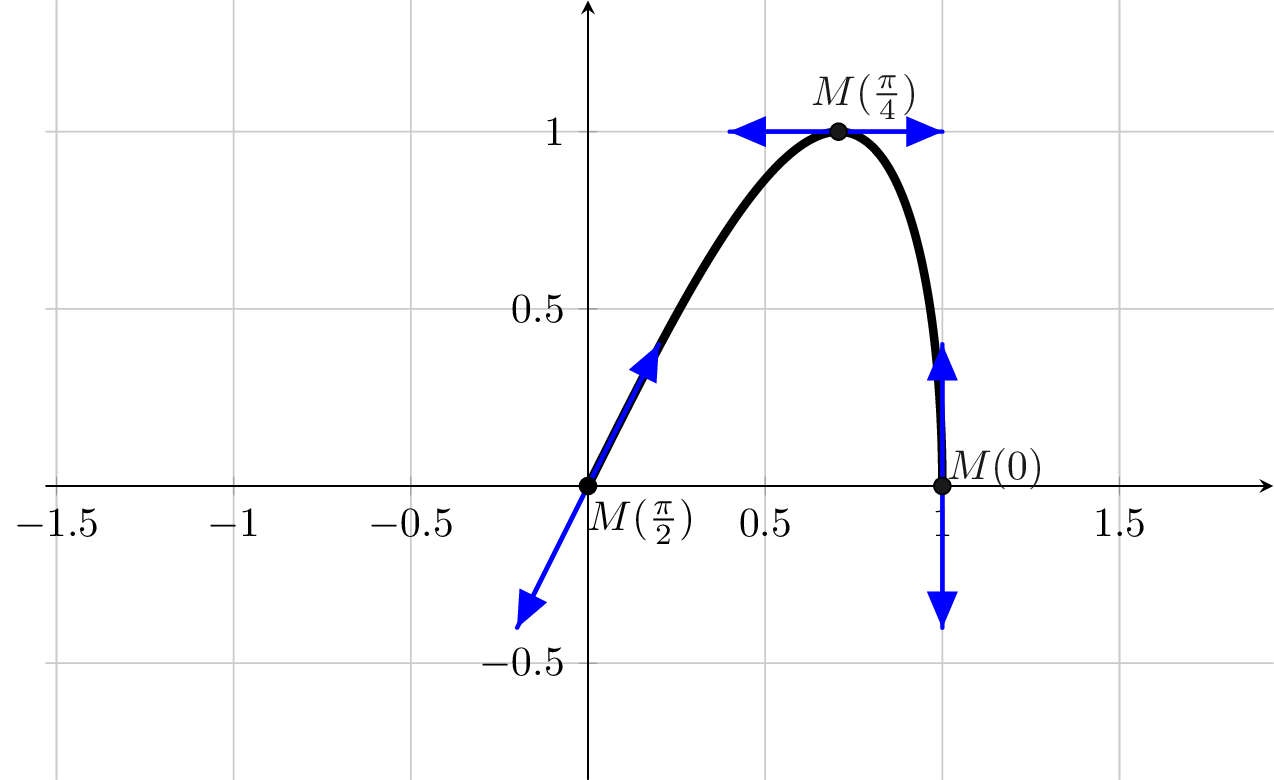
On place ensuite les symétrique des 3 points et 3 tangentes par rapport à
II.5 Étude en un point
Le cadre ici est d'étudier plus particulièrement l'allure de la courbe au voisinage du point
II.5.1 Continuer à dériver
Le raisonnement du théorème II.3.5 s'étend sans difficulté cas le cas oùAlors dans le repère
Plus précisément, dans
- Si
- Si
- on adapte les raisonnements dans les cas impairs pour trouver les 4 cas du points suivant.
II.5.2 Cas général
Suivant la parité de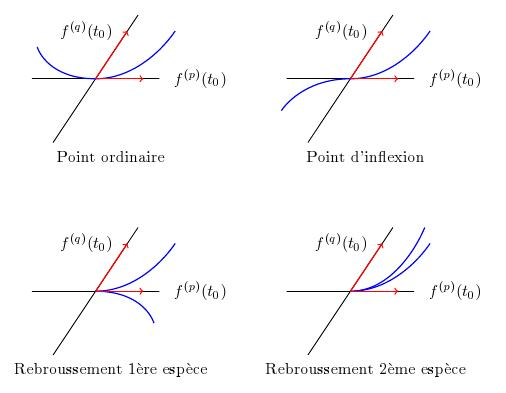
II.5.3 Méthode
Pour étudier l'allure d'une courbe au voisinage d'un point de paramètre- Trouver le pus petit entier
- Trouver le plus petit entier
II.5.4 Cas p=1, q=2
La vitesse et l'accélération ne sont pas colinéaires. C'est le cas le plus classique. Le point est dit birégulier . Dans ce cas la vitesse donne la direction de la tangente et l'accélération le sens de ``courbure''.II.5.5 En pratique
On peut tout à fait utiliser un développement limité deII.5.6 Exemple
Etudier la tangente au point de paramètre 0 de- On a
Pour finir, - Donnons des développements limités des fonctions
Ainsi, comme
II.5.7 Exercice
Trouver en fonction deII.6 Branches infinies
II.6.1 Définition
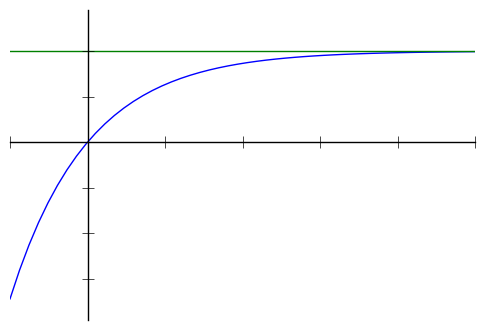
Soit
- Une des limite est infinie et l'autre finie : on obtient une asymptote qui est horizontale (lorsque seulement
- Ces deux limites sont infinies.
- Si
- Si
- Si
- si
- sinon on dit que
- si
- Si
II.6.2 Illustration
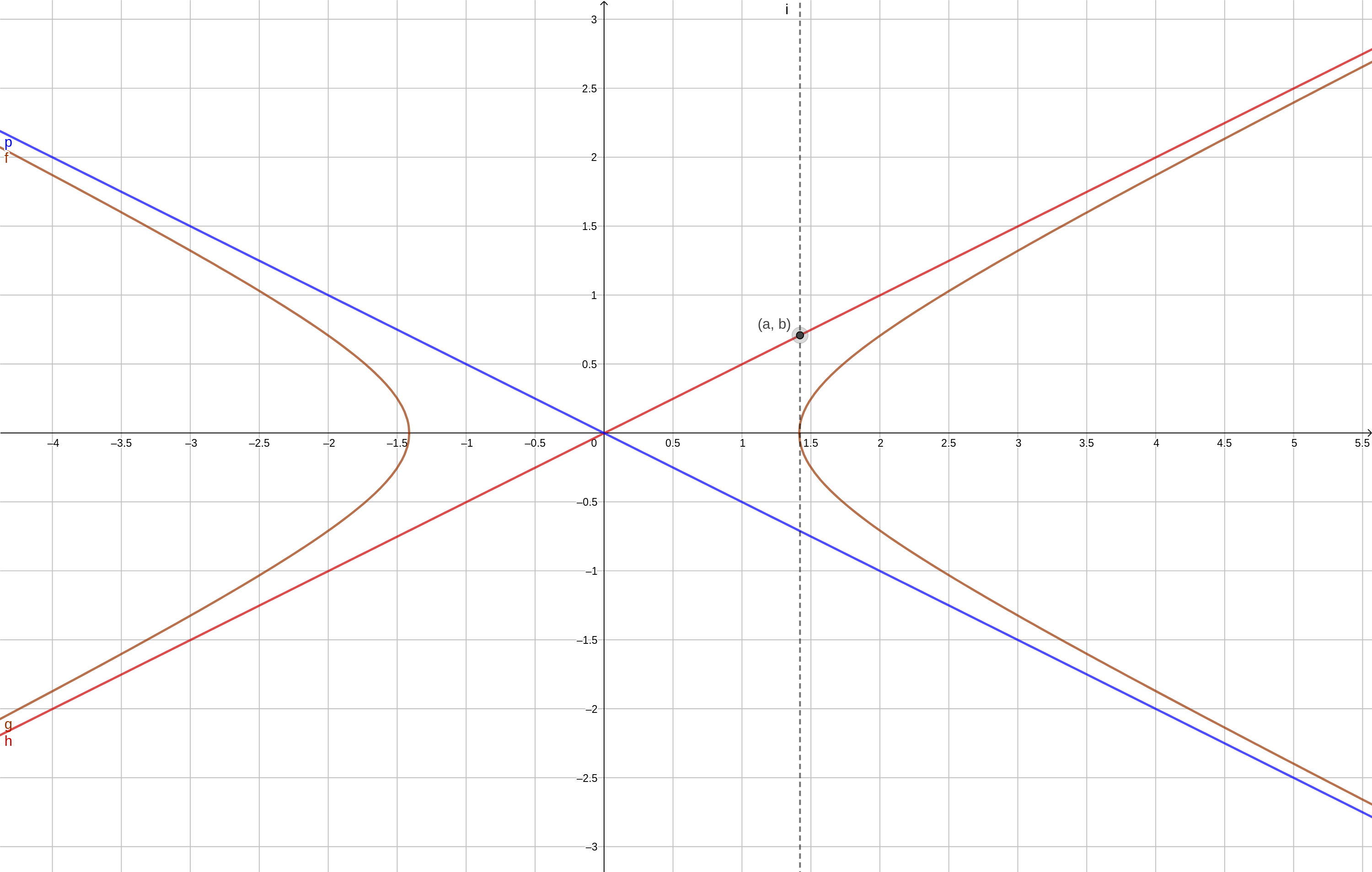
II.6.3 Application à l'hyperbole
Les variations ne présentent pas de difficultés particulières.Étudions la branche infinie en
- On a deux limites infinies.
ce qui élimine les asymptotes verticale et horizontale
- Pour
On en déduit que l'hyperbole admet la droite d'équation
Plan d'une étude
On pose- Souvent, l'intervalle de définition de
- Définir ensuite un domaine d'étude le plus restreint possible en utilisant les symétries des expressions pour
- Déterminer les variations et les limites de
- Exhiber les tangentes "intéressantes" ainsi que les points singuliers s'il y en a.
- Etudier les branches infinies éventuelles.
- Tracer la courbe en utilisant toutes les informations précédemment glanées.
- Repérer s'il y a des points
multiples
(par lesquels la courbe passe plusieurs fois) et les déterminer en trouvant